
The Gateway to GeoSLAM Resources and Support
Find a wealth of GeoSLAM resources and dedicated support information from our newly integrated web pages.
Elevate your Experience with our Mobile Mapping Solutions
From innovative solutions to time-tested favorites, GeoSLAM offers a range of mobile mapping solutions. Explore the range of products and discover what’s possible with mobile mapping.

Find a Distributor
Contact one of our Authorized Distributors to help with booking demos, pricing and to answer questions about how our solutions capture geospatial data quickly and easily.

Contact us Today
Follow the link to contact our team for information about our solutions, technical support or public relations.
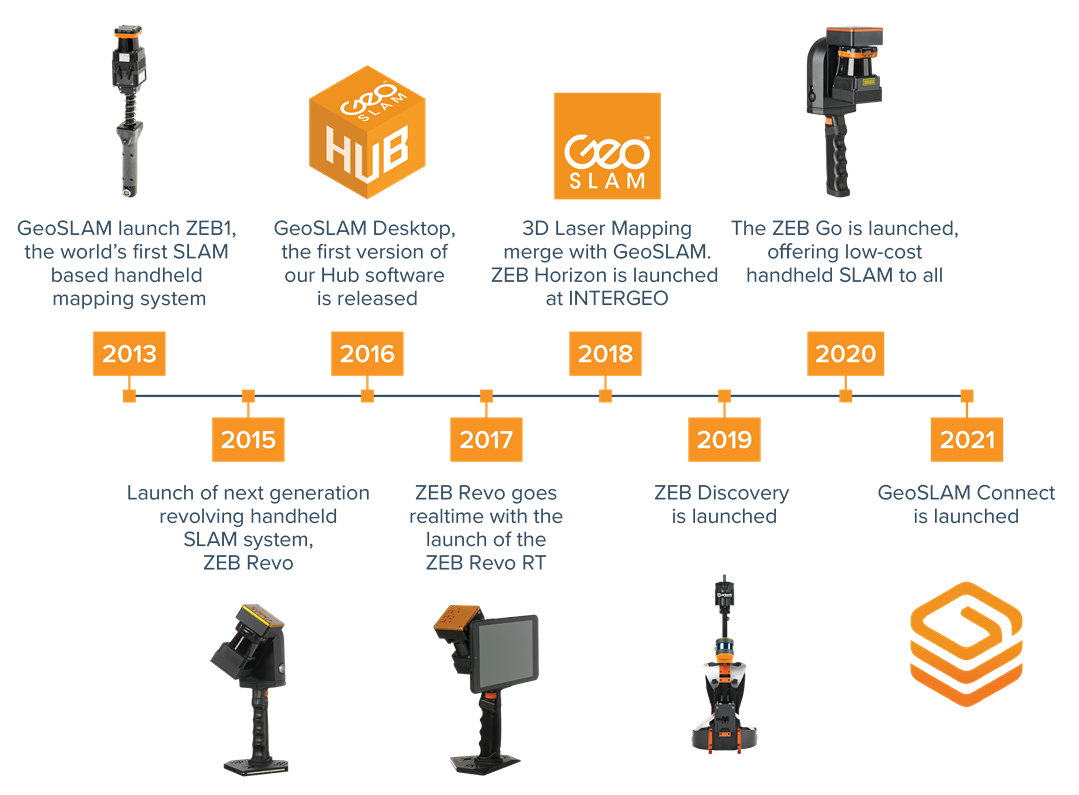
About GeoSLAM's History
Careers: Review our current career opportunities.
Events: Find out which upcoming events we’ll be attending.
Press: Read the latest articles featuring our solutions.
Values : See what we stand for at FARO Technologies.