How LiDAR Can Help Detect Change at a Community Micro Hydro Power Generation Site
Location
Congleton, UK
Scan time
25 Minutes
Size
100m x 100m Area
Scanned
Micro Hydro System
Industry
Surveying
How Using Micro Hydro Power Generation Produces Clean Energy
Discussions around climate change, and how we can lessen our environmental impact, have become increasingly more relevant in recent years. This has driven some companies and communities to explore different ways of producing renewable technologies, to reduce dependency on fossil fuels. One method for gathering renewable energy is by using Micro Hydro power generation.
Hydroelectric power generation relies on a constant water cycle. Nature is perpetually replenishing this, making it a good clean source of energy. This method of producing electricity using hydroelectric power generation is what the Congleton Hydro Project has set out to achieve.
Dane Valley Community Energy Ltd (DVCE), a non-profit community benefit society, developed and constructed the project. DVCE is a volunteer led organisation, run by a small team of volunteer directors, who have all worked within Engineering and Management Companies. Funded by the community of Congleton, the project aims to generate enough carbon-free electricity, using hydroelectric power generation, to power 60 homes within this local area.
Utilising an Archimedean Screw for Micro Hydro Power Generation
For this project, the team set up a Micro-Hydro System, including an Archimedean Screw. The hydroelectric energy is generated by the nearby Havannah Weir River. The energy is extracted by using the water flow to turn the Archimedean Screw, which is connected to an electrical generator. Having constructed the whole system in just 12 months, DVCE were able to produce their first load of electricity in a relatively short space of time.
The area surrounding the Archimedean Screw required significant and extensive ground works, together with a substantial walkway, powerhouse, and piped water inlet system. Whilst designing the project, it became apparent that a core worry would be movement of the terrain, due to weather and time. As a result, they decided they needed to frequently monitor this surrounding area.
The Archimedean Screw has a life expectancy of 40 years, and the team hope to make returns on their investments in the next 20 years. In addition to generating clean energy, a core objective is to generate an annual surplus, which will fund the local community. It is therefore essential that any change in land stability does not impact the planned generation. The team decided that a monitoring system would help identify any movement so that timely corrective action could be taken.
Tracking Changes in the Land and Facilities Management
Via a family member (Dr Jonathan Owen), the team acquired a 3D handheld laser scanner, GeoSLAM’s ZEB Go. The handheld nature of the scanner will mean they can track land movement and vegetation rates over time. In addition, they can map the on-site building to help with facility management and storage.
GeoSLAM Connect’s Stop and Go Alignment can help the team align these scans, as it would give them a more accurate view of the exterior and interior areas together.
GeoSLAM technology is ideal for this type of work, due to the uneven terrain. The mobile device can map an area by simply walking around, whereas systems that require a more complicated setup would struggle to scan the area promptly.
The Benefits of GeoSLAMs Technology
The ZEB Go’s speed of capture enables DVCE to carry out scans of the 100m x 100m area surrounding the Micro-Hydro System in just 25 minutes. As the team are detecting change in the ground movements and vegetation, they can frequently scan the area to track any issues that may arise. A great way to document the area, as frequently as DVCE need.
The ZEB Go’s ease of use means the team would not need to be survey trained for the scan, unlike more complicated to use scanning hardware. Further, the ZEB Go’s capabilities save all the team from having to repeatedly return to the site, as just one individual is needed.
The team were impressed with the ease that the ZEB Go was used to survey the complete site, with no tripods being needed and no complicated set up.
Creating Accurate Georeferenced Point Clouds
Whilst capturing the data, the team laid down control points using a GNSS receiver. This allowed the team to georeference the data using GeoSLAM’s software. Now the surveying pins are in place, the team can simply georeference the data for each scan they conduct.
Implementing control points was important for DVCE as it allows for clear comparisons between multiple scans of the same area. Georeferenced data places the scan in the real world and makes the data even more accurate. This will benefit the team as they continue to scan the Micro-Hydro System’s surrounding areas in the future and detect any gradual change.
The ZEB Go delivered an accurate 3D replica of the area that continues to help DVCE in their project. The versatility of the ZEB Go and resulting point cloud means the team can look into new ways to interpret the data – protecting this vital equipment for both the environment and local community.
Jonathon was the lucky winner of our ‘Win a ZEB Go Competition’ at GeoBusiness 2021.
If you’d like to learn more about how GeoSLAM solutions can help you, submit the form below.
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
3DMapping Informal Settlements in Bengaluru, India
Location
Bengaluru, India
Scan time
25-27 minutes per scan
Size
40 acres
Scanned
Informal Settlements
Industry
Surveying
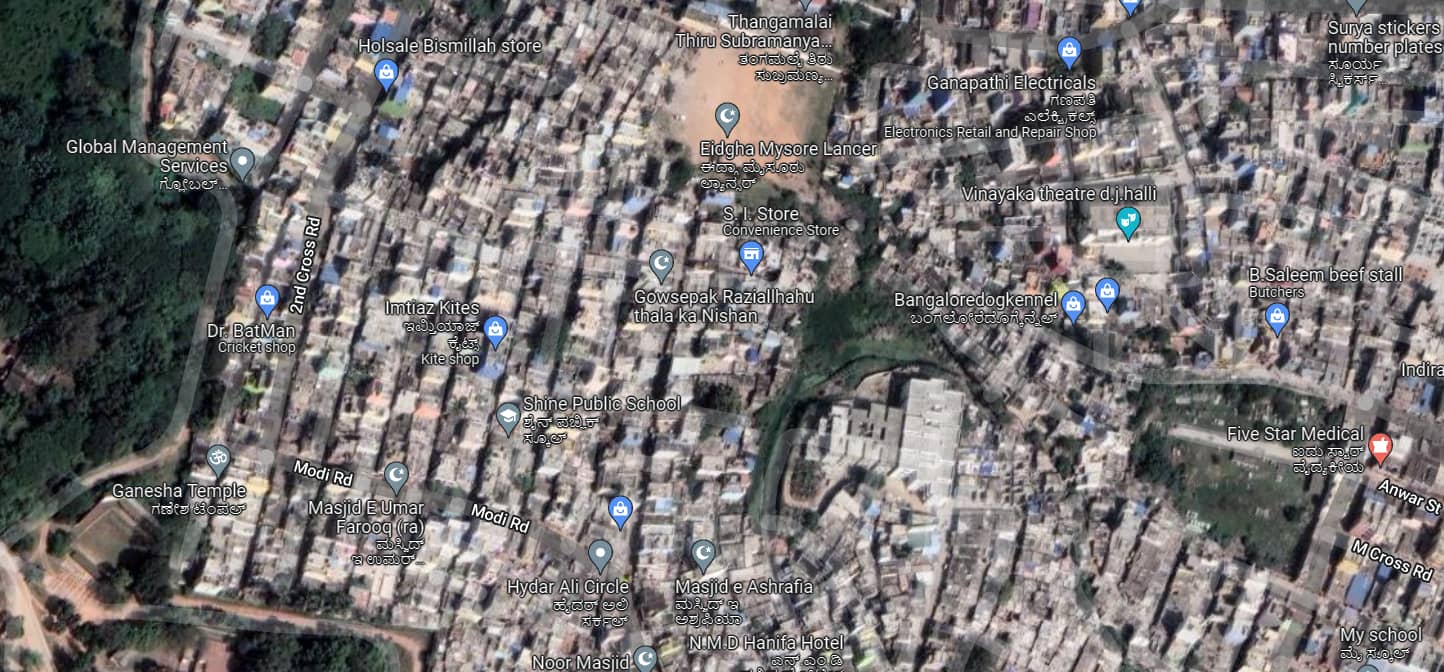
Accurately Mapping Informal Settlements in Bengaluru, India
The informal settlements in Bengaluru, India, house roughly 16% of the city’s population and there are around 500 recognised in this area.
Currently, Bengaluru is going through a period of modernisation and urbanisation which has caused the city limits to expand. As a result, the local government must provide documents of every house, detailing accurate measurements of its structure, such as boundary lines and roof heights.
The government has plans to formally declare ownership of the settlements to the people living in them, which means a map of the whole area was needed.
The Informal Settlements Narrow Lanes and Changing Environments
A team from a reputed geospatial company appointed by government, surveyed the area and collected this data. This involved mapping the informal settlements in Bengaluru with their complex layouts. The task was challenging as they include many narrow lanes that are difficult to access. Additionally, people were going about their daily activities.
Furthermore, some parts of the settlements are in dark and cramped areas whereas others are in direct sunlight. Consequently, the team needed to find adaptable solutions and technology that could handle these difficult environments, as well as deliver on the task in hand.
The area in question is a no-fly zone, which meant that drones were not an option. However, other methods for capturing data such as static scanning wouldn’t be feasible because of the busyness of the area. The cramped streets also meant the team would struggle to use a backpack solution either.
Scanning Difficult to Access Areas with ZEB Horizon
A fast and effective way to map the informal settlements was to walk through the complex passages, and a handheld laser scanner was the most suitable option. The geospatial company chose GeoSLAM’s ZEB Horizon scanner, due to its quick method of capturing accurate data and ease of use. The lightweight solution means that only one person is required to scan an area at any one time. This is less disruptive to the surveying team, which in turn is cost effective for them and their client.
The extensive maze of restricted passages and dead ends did not affect the versatile SLAM technology. By using the ZEB Horizon, the team were able to scan 40-45 different areas of the settlements. The team captured smaller areas of the informal settlements in a single scan ranging from 25-27 minutes. The team mapped larger areas over multiple scans, sending them to the client individually.
The ZEB Horizon provided good quality data and allowed us to scan difficult to access areas accurately and efficiently.
Creating accurate point clouds for the client
The final scans were imported into GeoSLAM Draw where orthophotos were automatically created. As a result, the engineers could make accurate measurements in a timely manner. In addition, the point clouds were exported to Terra Solid, where further information was extracted for the final report.
The final data delivered on their client’s accuracy goals. They were able to smoothly extract the boundaries and roofs of every single house in the informal settlements.
GeoSLAM’s technology in use elsewhere
This is not the first time that GeoSLAM technology has been used to map informal settlements in India. The ZEB Revo was used to accurately scan the settlements of Mumbai in 2017. The resulting 3D point cloud helped to extract information about the elevations and sections of each house frontage.
Surveying buildings is difficult and accessing hard to reach areas, like dropped ceiling or raised floors, without disrupting business can be seemingly impossible. In this blog we’ll discuss how SLAM and LiDAR technology has made scanning behind dropped ceilings a simple process.
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
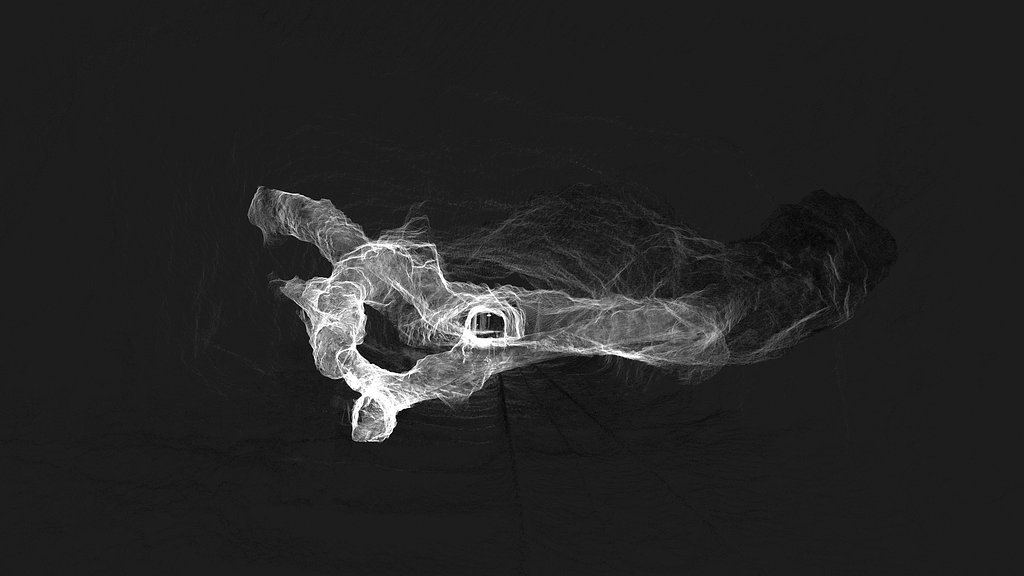
Peak Cavern
Location:Peak District, UK ZEB Scanner: ZEB Horizon Scan time:27 Minutes
This data was captured as part of the Big SLAM Tour of the UK, read about it here.
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Vent Shaft
Location:United Kingdom ZEB Scanner: ZEB Revo RT
This data was captured using GeoSLAM’s ZEB Cradle accessory.
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
Surveying Boston City Hall
Location
Boston, USA
Scan time
Approx. 20 minutes per scan
Size
Over 1 million sq/ft
Scanned
Boston City Hall
Industry
Surveying
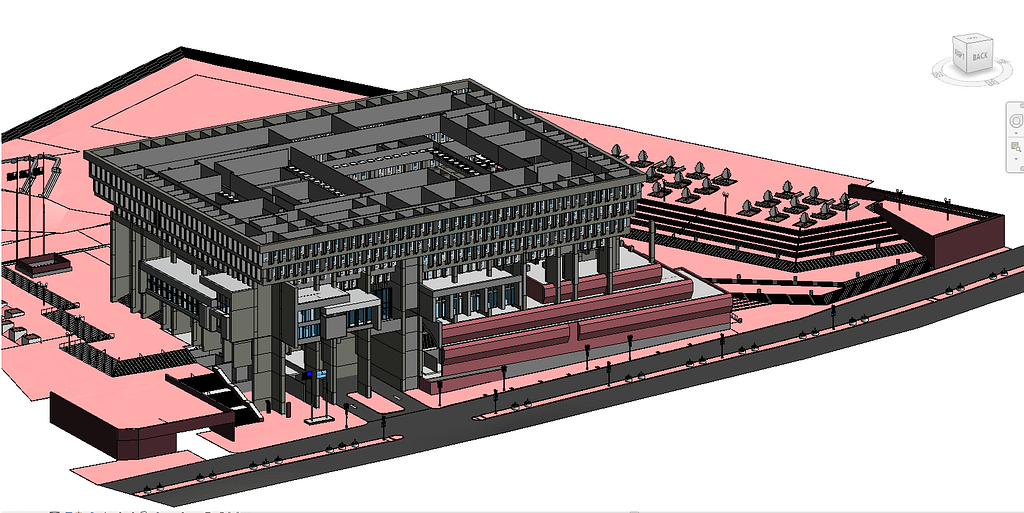
Mapping an Iconic Landmark
Boston City Hall was built in 1968, to help boost the city’s economy after years of stagnation. The building and surrounding plaza sought to modernize the city’s urban centre, reinvigorating the run-down neighbourhood of Scollay Square.
Despite the public investment project being welcomed by the people of Boston, the buildings ‘brutalist’ style of architecture created debate amongst the locals, with some suggesting you either love or hate the concrete design. In spite of the concerns from the public, the city hall has been home to the mayor of Boston and the city council for over 5 decades, and the ‘brutal’ style of architecture has become part of Boston’s rich history.
To encourage more people to use Boston City Hall and to increase accessibility, it was decided in 2017 that the City Hall would be renovated to serve a more modernized purpose. The infrastructure upgrades include better access to utilities, plants and fountains in the plaza area, with the intention of encouraging more people to visit.
The Horizon was a gamechanger…it’s just amazing in terms of the scanning distance, power of the sensor and the ability to easily capture the entire plaza.
Peter Garran and his team, from Aerial Genomics, were appointed by The City of Boston and Sasaki with the task of scanning both the interior and exterior of the City Hall, in anticipation of the renovation project. Spanning 9 floors and housing multiple individual rooms, as well as a busy plaza area, the task of mapping the building threatened to take several months to complete. Also, the City Hall is an active office that contains confidential rooms and Aerial Genomics did not want to disrupt everyday operations too much. Considering their options, the team decided the fastest and most cost-effective way of mapping the building and its surrounding area would be to use mobile LiDAR scanners.
They chose a ZEB Horizon to scan the exterior and inside the Main Hall. The ZEB Revo RT was used to map the buildings vast interior. These scanners were chosen due to their speed, accuracy and mobility. By simply walking around the building, Peter and his team captured the large layout, saving them time.
As they were scanning during the pandemic, it was key for Peter and his team to spend as little time as possible in the building and compared to other scanning methods, GeoSLAM’s scanners were able to deliver on that goal. With the ZEB Horizon, Aerial Genomics captured both the exterior and interior of the Main Hall in just 4 scans, and in less than 2 hours. This scanner was specifically chosen to scan the Main Hall due to its 100m range being able to capture the high walls. To help combat getting in the way of the City Halls’ day-to-day business, the team were given limited amounts of time in the evening to scan a multitude of rooms inside the Hall. Using the ZEB Revo RT, the team could scan the almost 1 million square feet interior, in just 4 nights, consisting of 5 hours each night.
The scans were processed using GeoSLAM Hub and merged to create one point cloud, by Aerial Genomics. The manoeuvrability, ease of use and accuracy that the ZEB scanners provided meant the data collected was ready within a week, to be created as a BIM model to send to the architects. The simple, easy to use solution meant the architects could start thinking about the redevelopment and renovation, without the need to visit the hall during a pandemic. The final BIM model, created in Autodesk Revit, is still referred to today.
If you’d like to learn more about how GeoSLAM solutions can help you, submit the form below.
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
Mapping a decommissioned power station
Location
Cape Town, South Africa
Scan time
8 Hours Total
Size
Approx. 117,000 m2
Scanned
Power Station
Industry
Surveying
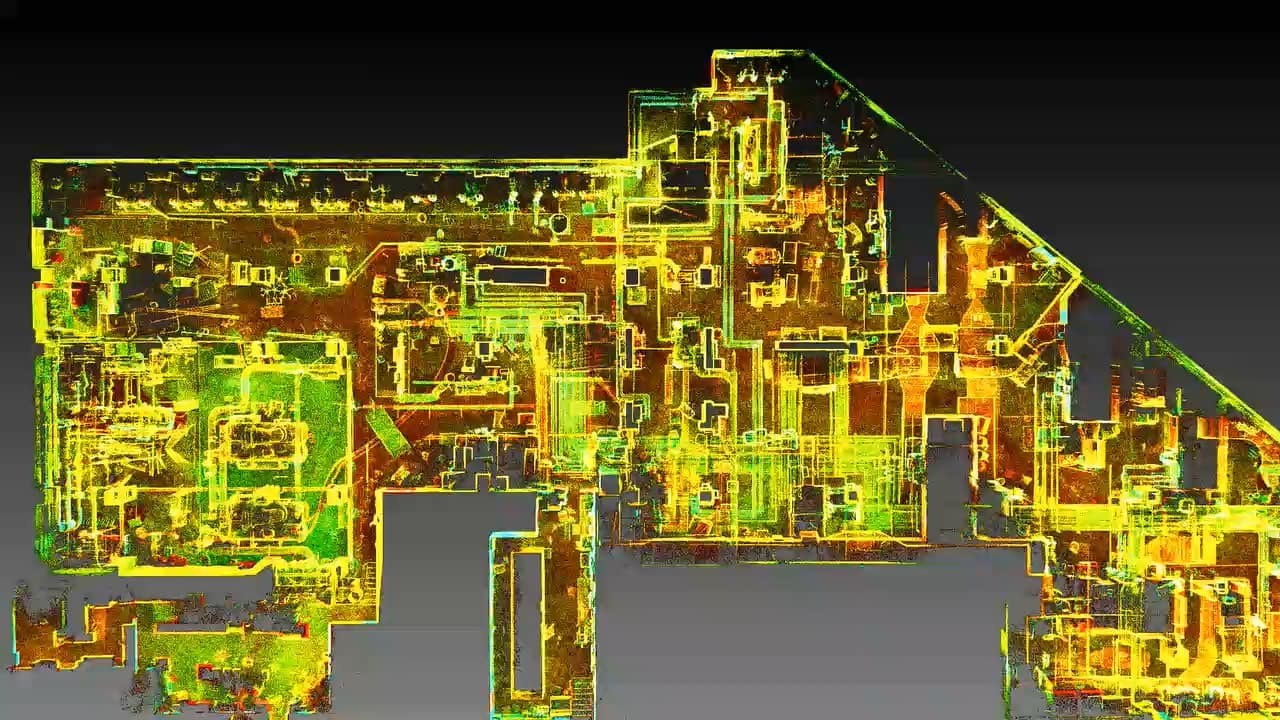
ZEB Family | Safely surveying a hazardous power station
All over the globe, countries are looking to nuclear and hydro renewables, not only to provide their electricity needs but to meet climate goals. This is resulting in the shutting down of coal-fossil power plants that no longer have a role to play in a fast-changing world.
Opened in 1962, the Athlone Power Station was the last coal-fired power station operating in Cape Town, South Africa when it stopped generating power in 2003. The iconic cooling towers, which were known by locals as “The two ladies of Athlone” and had long been a feature of the Cape Town landscape, were demolished several years later.
The efficient user-friendly GeoSLAM equipment enabled the team to safely and comprehensively survey this hazardous and complex plant.
Proper planning was essential as demolition can be potentially hazardous for the safety of personnel due to the plant’s age-structure, and onsite teams often having to operate across split levels, in total darkness. The removal of contaminated waste can be equally challenging. Cost is also a major factor and companies responsible for shutting down plant are continuously looking at ways to be cost effective while providing a reliable, fast and efficient service.
Aurecon, a global engineering, design and advisory company, won the tender from the City of Cape Town to project manage the site for the final stage of decommission. This involved surveying the plant whilst stripping, clearing and removing unused material, redundant equipment and certain historical structures. Their task also included securing all remaining structures, leaving the site in a secure state and registering servitudes for remaining bulk services. Aurecon found Athlone to be a challenging project due to accessibility issues and lack of light. Also, because of the Power Station’s historical importance, salvaging certain unique equipment had to be considered. The team needed a simple and effective solution that could accurately map the site quickly while keeping them safe in a tough environment.
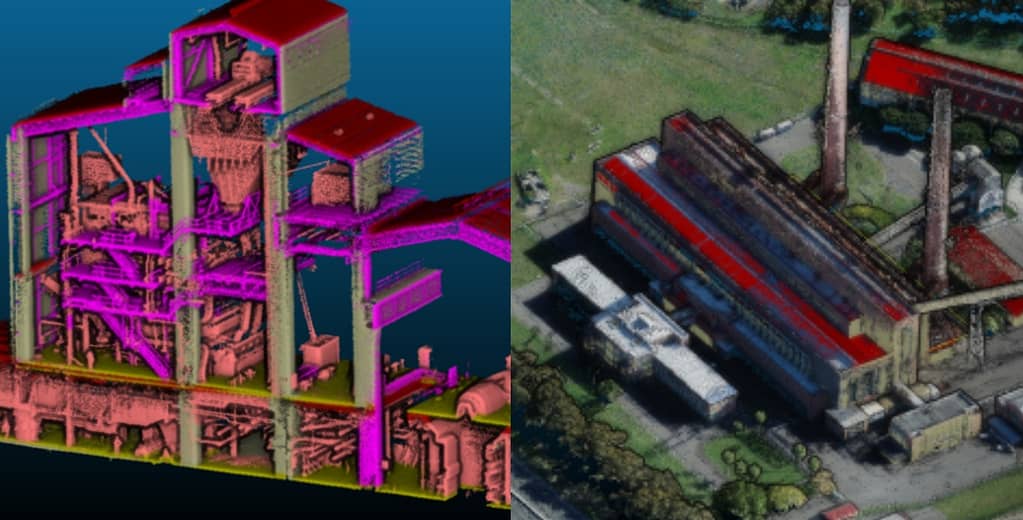
Aurecon chose to work with mobile LiDAR scanners so that the historians, structural engineers and environmentalists could have the data they needed, without having to enter the potentially dangerous site. For the Athlone project, GeoSLAM’s ZEB Revo RT scanner and ZEB Pano camera were used, as well as theZEB Horizon and ZEB Cam. The building’s interior and exterior were scanned with the ZEB scanners The two data sets were merged to provide a full 3D point cloud of the entire building.
Using the Pano, the team generated photos that were incorporated inside the point cloud, so that the offsite survey team could have greater visualisation of the site to feedback commentary. The efficiency of the scanners and speed of capture meant that unlike other scanning methods, the team could repeatedly capture the site. This meant that decisions and assessments could be taken frequently, without the need for lots of people to visit the dangerous site.
In total, the whole facility was scanned in three days with data sets processed overnight, a total of eight hours. The combined datasets were available within a week, which enabled Aurecon’s modellers to commence work on the classification of components in the power station.
The final 3D point cloud representation of the interior of the power station enabled the engineering team to assess and quantify the amount of salvage and scrapped material to be removed from the site, and to plan the logistics of the removal in context with the physical shape and size of the existing building.
The accurate 3D model equipped the stakeholders with information that allowed them to safely and precisely analyse for activities such as material quantification, condition assessment and the preparation of decommissioning method statements.
If you’d like to learn more about how GeoSLAM solutions can help you, submit the form below.
Referencing using control points
What are control points?
Control points are points within a given area that have known coordinates. They are a key tool in the geospatial industry and can be utilised in a variety of ways, including georeferencing point clouds and aligning aerial images to terrestrial data. By using control points, surveyors are able to accurately map larger areas and position overlapping surveys of an area together. They can also be used in non-geospatial industries, such as construction and mining, to show clear temporal comparisons between multiple surveys of the same area. This method of georeferencing is also referred to as adjust to control.
Previously, checkerboards and spherical targets have been used as control markers – these items are captured in surveys and can be identified for georeferencing or aligning. The main drawback with these methods is that they rely heavily on human interpretation when processing, meaning that the processed datasets may be susceptible to an increased amount of error.
When capturing handheld surveys, GeoSLAM systems are able to collect reference points. These can then be matched with known control points to reference scans and increase the level of accuracy.
What makes GeoSLAM referencing different?
More accurate: GeoSLAM scanners are used with known control points and survey grade pins, rather than more traditional moveable targets. This reduces the margin of error within point clouds.
Save time: using known survey control points means there is no need to manually position individual targets before every scan. Data capture can then be repeated regularly, faster, easier and with no concerns that reference points are captured in different places each time.
Safer: in dangerous or inaccessible areas, targets are not required to be physically positioned on pre-defined control points prior to each scan. This reduces the time exposed to hazards and unsafe areas.
Industries using control points
Geospatial
Easily reference point clouds and produce reports highlighting accuracy values.
Mining
Regularly monitor site operations (e.g. stockpiles) and hazards.
Construction
Compare changes over time and map progress onto predetermined CAD/BIM models.
Using control points with GeoSLAM
Capture
All GeoSLAM ZEB systems are able to capture reference points using the reference plate accessory. These reference points can simply be measured by remaining stationary for periods during a scan and will be recognised during the processing stage. Points can be captured from a horizontal or vertical position, depending on which ZEB system is used, making it easier than ever to georeference datasets.
Process
Using the Stop & Go Georeferencing workflow in GeoSLAM Connect, datasets can be automatically referenced through a rigid or non-rigid transformation.
Rigid Transformation
Scans are rotated and adjusted and reference points are matched to the known control points without changing the scale factor. A single transform is applied to every data point in the point cloud.
Non-Rigid Transformation
The scale factor of datasets is altered to suit the control points – every data point is moved to a new position; this means the relative positions of these points also changes. This method is better suited for poor SLAMenvironments.
A clean georeferenced point cloud is produced using both methods. An accuracy report of the transformation is also generated and includes an RMS error value.
Point clouds with endless possibilities
Once georeferenced using control points, point clouds can be optimised further using leading third party software:
Comparisons with existing CAD/BIM models
Point cloud to point cloud registration showing changes over time within a given area
CAD/BIM model creation
For more information about our third party partnerships, head to our integrations page.
Case Study
Mapping hazardous mines under intense time constraints
Beck Engineering, an Australian mining engineering consultancy specialising in mining and rock mechanics analysis, needs to rapidly map mines under intense time constraints using versatile technology which is adaptable to any environment. GeoSLAM’s handheld mobile mapping solution was chosen as it is compact, portable and delivers a high level of accuracy. With GeoSLAM’s “go-anywhere” 3D technology in hand, Beck Engineering has been able to supply invaluable data regarding the direct effects of mining to better understand the implications of a deforming rock mass. Beck Engineering is now able to accurately measure the shape of an excavation or tunnel over time. As a result, tunnels are safer, better designed and more cost efficient.
We have continued to use GeoSLAM products as they have proven to be affordable, lightweight and sufficiently robust devices for their application underground. GeoSLAM continues to produce a high-quality device that is at the forefront of practical mobile laser scanning devices. – Evan Jones, Senior Rock Mechanics Engineer at Beck
A collective term for modern tools that map and analyse the earth and most things on it, geospatial technology is making huge advances. These technologies help us to understand spaces, monitor changes and patterns in landscapes, cities and even societies. So, what is geospatial technology?
What Does Geospatial Mean?
To understand what geospatial technologies are, we must start with an understanding of the word ‘geospatial’. In simple terms, geospatial refers to location-specific data. Geospatial information relates to features on the surface of the earth and their geographic locations.
So when it comes to what geospatial means, it’s really anything relating to a location.
What is Geospatial Data?
Geospatial data is any data that has a geographic component to it. It can describe features, objects, or even events that have a specific location. Geospatial data will combine information about the location and attributes of an object. Location information can be either dynamic or static.
Such data can be collected in a variety of ways. Using remote sensing, geospatial data can be collected without close proximity to the area. For example, vast amounts of information can be gathered using unmanned aerial vehicles which makes gathering this information fast and effective.
Examples of Geospatial Data
Geospatial technologies can be used to collect data, but this information is represented in different ways depending on the technology chosen. Here are some examples of different types of geospatial data:
Point Cloud Data
Using remote sensing, laser scanners like our ZEB family collect a huge amount of tiny points within an environment. All these points together are called a point cloud. Each point has a location coordinate, and the set of points can be interpreted to create a 3D model of an area or object. Find out more in our article on point clouds.
Christ the Redeemer Point CloudForestry Point CloudCave Tunnel Structure Point CloudHotel Colourised Point Cloud
Vectors
Vectors consist of points, lines and polygons. Each point has a coordinate, and lines and polygons are formed by connecting these. These elements represent real-world features in any given environment. Each feature will have text or numerical attributes to describe them.
Satellite imagery
High-resolution satellite imagery is a type of geospatial data too. Satellites can help to view our world from a distance, showing us a much bigger picture.
Census data
When census data is linked to a geographic area, it becomes a type of geospatial data too. For example, city planners will use population data from a Census to plan where they might build new roads, schools or hospitals.
Who uses Geospatial Data?
There are a whole host of uses for geospatial data, which means a wide range of groups, companies, and people use it. Some examples of these are:
Military
Intelligence agencies
Retail
Maritime
Healthcare
Finance
Aeronautical
Logistics and transportation
This data can be used for analysis, modelling, simulation and more. Geographic information is vast and rich. It can be really powerful when used effectively.
So, What is Geospatial Technology?
Now that we’ve explained what geospatial means and geospatial data is, it’s time to consider how this translates into technology. Geospatial technology is used to collect and analyse geospatial data. It’s a collective term for the various modern tools and systems that help us to map the earth’s surface, understand societies and interpret spatial patterns.
Examples of Geospatial Technologies
The term ‘geospatial technology’ is broad and covers a whole host of different things. Here are some examples of commonly used geospatial technologies:
Remote Sensing
LiDAR (light detection and ranging) is a popular method of collecting spatial data using remote sensing. You can find out more about this type of laser scanning and how it works in our dedicated article: What is lidar?
GPS
A global positioning system (GPS) is a type of geospatial technology that most people have heard of and used. GPS data is collected by satellites and is used globally for navigation and geolocation. Global positioning systems have been fully operational since 1993. All modern smartphones contain GPS so you can see where you, or somebody else is on a map in near real time.
GIS
Geographic information systems (GIS) combine maps with a database of other descriptive information. Geographical information systems allow the management and analysis of location information. This type of spatial analysis has provided so much insight, it really has changed the way the world works.
A base map can be layered with other data sources to create a powerful visualization. GIS information might include things like satellite imagery, aerial photography, point cloud or vector data. Digital software brings all this information together.
As internet mapping technologies like Google Earth and Microsoft Virtual Earth become more accessible, it’s much easier for the average person to visualize data from a geographic information system.
Why is Geospatial Technology Important?
Geospatial technology enables the collection of geospatial information, and this data collection is extremely valuable. It’s so important because it can inform us about so many different things. From improving national security to urban planning, biodiversity conservation, providing humanitarian relief and even forest fire suppression, geospatial data science has so many applications. Take a look at our detailed blog covering why geospatial information is so important for more information.
Where is Geospatial Analysis Used?
In short, geospatial analysis touches every aspect of our lives. It’s used by scientists, decision-makers, conservationists, governments, urban planners, businesses and healthcare professionals amongst many more.
Geospatial information is often used for research and development. It can be used in modelling and simulations, which can inform future decisions. It gives people the ability to create a virtual world that can be tested and simulated to measure effects, so decisions can be made more safely. Geospatial analysis enriches our understanding of the world around us and has opened up so many possibilities.
Want to see how GeoSLAM could transform your business?
Get in touch below and we’ll connect you with a local dealer.
Bloom Cloud Engine is a powerful on-premise point cloud editor ideal for use in Design, Fabrication, and Construction applications. Easy to deploy across your project team, BloomCE allows users to optimize and condition the point cloud data from all reality capture modalities, providing the fundamentals for Asset Management and Digital Twin project requirements.
Blacklight, based in Romania, focuses on information technology that captures, measures and visualises data used in various fields of activity through providing valuable solutions.
Cybernetech Corporation, based in Japan, is a specialised trading company that offer advanced information and communication equipment and geospatial information technology.
Seiler Instrument is an American company that specialises in distributing surveying software and instruments serving industries such as surveying, engineering and construction.
Favre, Développement & Foresterie, based in Switzerland, are experts in geomatics and work with public and private landowners for forest management and environmental heritage.
3DT Digital Manufacturing is an Australian company that use the latest technology to adapt to changes in real time. It aims to help their customers become more efficient and productive.
Sigma Mascot, based in Hong Kong, provides solutions for 3D Laser Scanning, Geospatial systems and BIM services for industries such as Forestry, Construction and Real Estate.
Precision Laser & Instrument is an American company that offers comprehensive positioning solutions for the Construction, Survey, and GIS industries. They ensure high returns on investments and business success.
Export your point cloud into a range of formats, including LAZ, LAS, PLY and TXT. Datasets can also be exported as structured or unstructured E57 files, both of which include embedded panoramic images.
Surface normals at each point can now be computed from PLY and E57 formats, allowing users to export colourised data and create a high-quality polygonal mesh in third party software .
Stop and Go Georeferencing
Known control points are captured during a scan and automatically compared and matched to the associated coordinates during the processing stage in Connect. A rigid and/or a non-rigid adjustment can be made to the dataset and an accuracy report is exported, highlighting how successful the transformation was. Users can now view and manipulate the processing parameters to ensure a more accurate match between points.
Manual Alignment
Align multiple scans using a combination of manual and automatic processes. This workflow can be performed on two or more scans in the same project. Users have a choice to export the aligned scans separately or as a single merged point cloud.
JP Interactive Viewer
Leverage your GeoSLAM data by integrating JP Interactive Viewer into your workflows. JPIV allows you to unlock the full potential of your reality capture data and distribute actionable insights across your teams.
Our support team will be available for GeoSLAM Care customers on:
Monday 26th, 8 am – 4 pm (GMT)
Tuesday 27th, 8 am – 4 pm (GMT)
Wednesday 28th – 31st December – standard support hours
Monday 2nd January, 8 am – 4 pm (GMT)
From Tuesday 3rd January – standard support hours resume
Test pop-up
fsikajntgfitdshagklndsakj;gnjkdasklngklsa
Click here to view the release notes.
Autodesk Recap
Autodesk Recap contains tools for the manipulation and interpretation of high quality point cloud data and to aid designers and engineers in their creation of 3D models for real-world projects and assets (e.g. buildings and other infrastructure). It’s integrated design features help to streamline workflows, for example Scan to BIM. Recap is used to create initial design projects that users can then take into other Autodesk modules (e.g. Revit, Navisworks, AutoCAD).
Autodesk Navisworks
Autodesk Navisworks is a comprehensive project review solution that supports co-ordination, analysis and communication of design intent and constructability. The software can be used as a common data environment (CDM) for multidisciplinary design data created in a broad range of Building Information Modelling (BIM) packages. Using the tools within Navisworks, users can anticipate and minimise and potential problems between the physical building and the structural model.
Autodesk Revit
Autodesk Revit is a building information modelling (BIM) software. It contains tools which allows for planning and tracking throughout the building’s lifecycle. The software also allows multiple disciplines to collaborate more efficiently and make more informed decisions early in the design process. As GeoSLAM’s hardware allows for quick data capture, the equipment can be used to scan any existing buildings with the purpose of using the data to produce a digital twin.
Orbit GT allows users to capture and manage available 3D data (LiDAR data and imagery), extract a range of features for map production and make data sharable. All Orbit modules are ready to be used with 3D data from indoor, oblique, UAS and mobile mapping projects with other extensions that can be added to the Publisher and Orbit Cloud. Orbit can be used with the ZEB Discovery solution.
ContextCapture
ContextCapture is a reality modelling tool, allowing for the import of any point cloud and imagery data for the creation of high resolution reality meshes. These realistic meshes are accurate representation in 3D with high resolution RGB values of any scanned environment. By using GeoSLAM data in ContextCapture the users are able to create indoor reality meshes, which has been never possible before.
Microstation
Microstation is a 2D/3D software for designing building and infrastructure projects. It includes building information modelling (BIM) tools to document and assess any type of asset throughout its lifecycle. GeoSLAM solutions are often used in Microstation in the underground mining sector and to assess the current stage of any built environment, update the design model, and generate BIM information.
Deswik
With the GeoSLAM Connect stop-and-go georeferencing feature, users can easily georeference headings from known positions and map for analysis of overbreak, underbreak, undercutting and blast roughness calculations. This information is used within Deswik Mapping to analyse headings and levels.
Esri
Outputs from GeoSLAM’s solutions can be input to Esri’s GIS programs and apps, including ArcPro, ArcDesktop, ArcGIS Online and ArcScene. Join point clouds with local geodata or classify and edit scans based on their geography and statistics.
Micromine is a detailed and diverse mining software that provides solutions including modelling, estimation, design, optimisation and scheduling. Once data is exported from Connect it can be imported into Micromine and easily converted into wireframes. These can be used in Micromine for further studies into volumetric slicing, over and underbreak analysis, geologic modelling, face mapping and many more.
Terrasolid provides tools for data processing of airborne and mobile mapping LiDAR data and imagery. It includes different modules for tasks like data manipulation, calibration, georeferencing, point cloud classification, modelling and many more. It is a very powerful tool for a variety of industries, surveyors, civil engineers, planners, designers. Full, UAV or lite versions of Terrasolid modules are available for both MicroStation or Spatix software. All GeoSLAM products are compatible with Terrasolid and GeoSLAM data can be enhanced and edited with this software.
Floorplanner
Floorplanner allows you to draw accurate 2D floorplans within minutes and decorate with over 150,000 items from kitchen appliances to tables and chairs. Data is exported from GeoSLAM Connect in PNG file format with a scale of 1cm per 1 pixel and can be taken into Floorplanner.
Unity
GeoSLAM 3D point cloud data can be imported into Unity 3D Game Engine to generate interactive 3D scenes, where users can create 3D BIM models with textures and explore the space in 3D photorealistic environments.
Unreal Engine
Although Unreal Engine is mainly built for developing games, increasingly users are starting to use it to develop VR applications for understanding the current conditions of buildings, infrastructure and similar. Unreal Engine with a point cloud plugin can be used to visualise GeoSLAM point clouds in VR, which allows for collaboration, simulation and the understanding of current conditions of any scanned environment. Additionally, Unreal Engine tools are completely free.
Veesus Arena4D
Arena4D is a software package for marking up, annotating and editing 3D point cloud data containing a various export capabilities. It has a powerful and simple to use animation package which allows users to visualise massive point clouds in a simple way. GeoSLAM data can be simply uploaded and used in this package for the assessment of the current conditions of any structure, comparing differences between captured data (as built) to designed model (as designed).
Pointfuse
Pointfuse generates 3D meshes from point cloud data and classifies them to building ceilings, walls, windows and other features in IFC format. By using GeoSLAM data with Pointfuse users can very quickly create a classified BIM model with minimal manual input or expertise needed.
MineRP
MineRP has a Spatial DB that uses GeoSLAM data to represent visually the real environment of the underground mine. The software uses other data layers to overlay information on the digital landscape for decision making and tracking.
Pointerra
Pointerra provides a powerful cloud based solution for managing, visualising, working in, analysing, using and sharing massive 3D point clouds and datasets. Pointerra allows users to simply visualise and interrogate GeoSLAM data from anywhere.
Nubigon
Nubigon is a software solution that allows users to seamlessly interact with large point clouds and create visualisations and animations. Take your GeoSLAM point cloud data into Nubigon to create eye-catching flythrough videos.
Here is an example of a visualisation created in Nubigon using GeoSLAM point cloud data:
SLAM Environmental Pre-sets
Common data capture scenarios, such as UAV, outdoor, indoor, linear, and vehicle, have been characterised in Connect and data processing pre-sets for each environment have been defined. These can be selected at the beginning of the data processing stage allowing this process to be highly simplified.
Closed and Open Loop Georeferencing
Both methods match the scan data from a ZEB Locate system with the GPS data collected from the antenna to georeference the point cloud. When a scan starts and ends in the same place, this is classed as “closed loop”. “Open loop” is when the start and end position of a scan are in different locations. Standard SLAM practices apply to both methods of data collection.
Open Loop SLAM for the ZEB Locate is available on request – let’s talk about it.
Stop and Go Alignment
Common static points are captured during several scans meaning that these datasets can be automatically aligned. A single point cloud is then exported as if the data was captured in a single scan.
Floor Slices
Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at a given height above the floor as defined in the processing stage.
Change Detection
Mostly used in the construction industry, multiple point clouds can be compared and any areas that have changed are automatically highlighted. Point clouds can also be compared with CAD models – for instance to track progress on a construction site – and PDF reports can be generated to present this information.
Queued Processing
Import multiple .geoslam files into Connect for processing and the scans will be processed in the order they were imported. The size of the queue can be defined by the user.
Enquire about the ZEB Horizon RT
Error: Contact form not found.
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if pointcloud is coloured)
UK payment plan
UK payment plan info
USA Payment Plan
Coupling with hardware
Some SLAM software algorithms have been made available as open-source on the internet, but they are purely algorithms and not a product that you can take and use off-the-shelf. SLAM is most successful when it is tightly coupled and designed with specific hardware in mind. A generic SLAM cannot perform as well as one that has been specifically designed for a purpose.
Usage in multi-environments
Visual SLAM is closer to the way humans navigate the world, which is why it’s popular with robotic navigation. But in the same vein, vSLAM will have the same image-capture challenges as humans do, for example not being able to look into direct sunlight, or not having enough contrast between the objects picked up in the image. These can be overcome indoors, however, you may need to map a forest, tunnel or urban canyon. While SLAM technologies don’t rely on remote data (meaning you can scan areas where there is no GPS), you do need to ensure the SLAM technology you chose operate well inside, outside, in daylight and darkness.
Real-time data capture
Mapping a property is time-critical. Ideally, you want to make a single visit and gather sufficient data to create a highly accurate 3D model. Ensure the software you choose transforms 3D point cloud data into actionable information in real-time. This allows you to view and interrogate your data whilst still in the field, and make any adjustments, or collect missed data, then and there.
Flexibility and deployment
If you’re trying to map an enclosed environment (e.g. tunnel, mine) or a complex, difficult-to-access space such as a heritage building with tight stairwells and uneven floors, you need to use fully-mobile, adaptable technology. Wheel-based systems, often used with the vSLAM camera, will struggle with access. Handheld devices or LiDAR scanners that can be attached to a drone or pole and still deliver accurate results in a rugged environment are best for navigating hazardous spaces.
Speed and accuracy
While vSLAM is able to provide a qualitative high-level map and sense of the surrounding features, if you’re needing survey-quality accuracy and rich-feature tracking at a local level, you’ll need to consider LiDAR. Cameras require a high-frame-rate and high processing to reconcile data sources and a potential error in visual SLAM is reprojection error, which is the difference between the perceived location of each setpoint
and the actual setpoint.
Quality and distortion
In order to deliver the depth required for high-quality data, a number of depth-sensing cameras are needed with a strong field of view. In most cases, this isn’t possible, especially as cameras with high processing capabilities typically require larger batteries which weigh down airborne scanners, or limit the time of flight. LiDAR is both faster and more accurate than vSLAM, and can deliver detailed point clouds without expensive (and timely) camera processing.