Surveyors need to accurately capture, manage and utilise 3D spatial information – often in environments where there is very limited time on site. Omega Geomatics, a land surveying practice in the UK, took on one such task when they produced 2D floorplans for a nursing home, while the site was occupied 24/7. Paramount was ensuring minimum disruption to residents, while still achieving a high level of accuracy.
With the building measuring 663m2 and with 23 residential rooms, communal and staff areas, the project team needed to find a new surveying method that meant they could walk and scan each resident’s room quickly without disrupting their daily routines.
Two surveyors visited the nursing home and coordinated five spheres by the building exits on multiple levels. With GeoSLAM’s ZEB Revo, and its speed of capture capabilities, the team were able to walk around the building and capture the data needed from each room within just 10 to 20 seconds.
With just two team members required for the project and less time expended on site, the overall cost was dramatically reduced
The team conducted long-distance checks and height measurements. External scans took place, as an extra accuracy check. The entire scan took just 30 minutes, and the client was provided with accurate 2D floorplans within 24 hours, notably without any distress or disturbance to residents.
The project required just two team members and this rapid data collection had huge cost-saving benefits. In turn, this led to less time spent on site, which also contributed to reducing the cost, all without compromising on accuracy. The scan achieved an average +/-15mm which met the needs of the client.
The Importance of Accurate Measurements in Construction
In Denmark, inaccurate data of floor space in residential or office buildings can have legal implications. Therefore, building contractors must provide accurate measurements for the built floor area for each apartment before a purchase could be finalised.
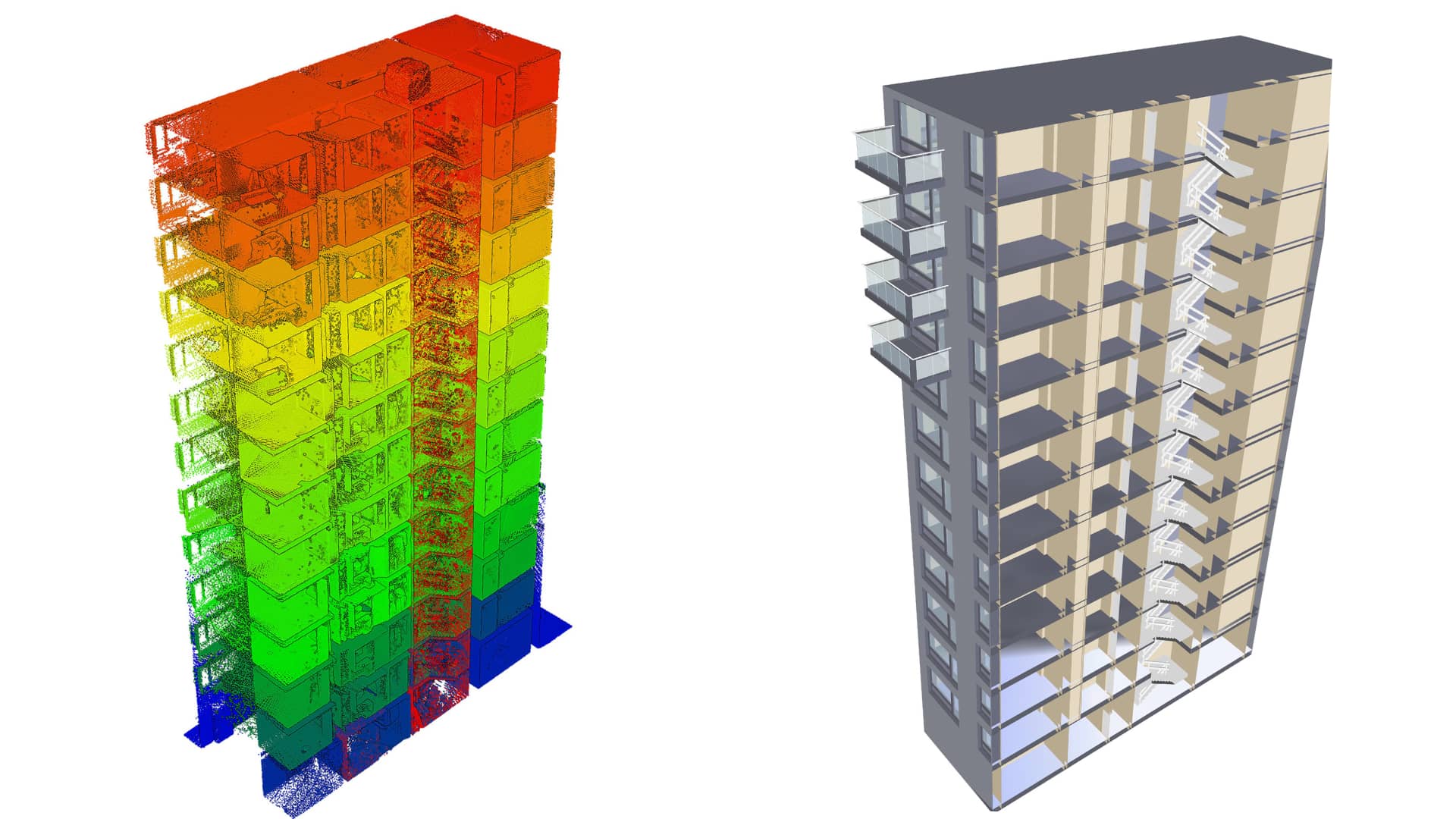
LIFA Surveyors is one of the leading surveying companies in Denmark. They were recently tasked with collecting floorplan data for a 13-story waterfront apartment building in Vejle. The apartment building, totalling 58,000 sq. ft, was going through construction, and each apartment required accurate measurements of the floor space.
Consequently, LIFA Surveyors needed a solution that could precisely map each apartment at speed and with minimal disruption.
How GeoSLAM Technology is Beneficial for Surveyors
They decided to work with handheld SLAM laser scanners and found that GeoSLAM’s ZEB Revo was the best solution for the job.
The ZEB Revo appealed to LIFA for various reasons but above all the scanner is easy to use, requiring minimal training. As a result, the entire building could be scanned by one person in 30 minutes. Further, the ZEB Revo’s speed of capture combined with its accurate measurements, meant that LIFA could achieve its goals cost-effectively.
We surveyed an entire 13-storey residential building in one and a half hours with only 30 minutes needed for the actual scanning.
Using accurate measurements and point clouds to Create BIM Models
The 3D point cloud data collected by the ZEB Revo was used to create a Building Information Model (BIM). Technicians used the BIM to take measurements of the apartments and common spaces, such as hallways and elevator shafts. During this process, the team visually compared the model against the original design plan to ensure that all building elements were constructed correctly. Due to the efficiency of the scanner, LIFA achieved the accuracy needed for their client.
The speed of capture and ease of use resulted in LIFA surveyors dramatically reducing their time on interior building survey from days to hours, whilst maintaining high levels of accuracy.
Within days of the scan, LIFA delivered the final measurements to the contractor – a cost-effective solution for both companies.
As mobile laser scanning becomes faster, more cost effective and accurate, surveying companies are finding them to be one of the most efficient tools for capturing the spatial details of a building in 3D. Pointclouds are being used more and more in the property renovation and architecture markets, where the use of LiDAR and SLAM are driving down cost and increasing efficiency.
CEP David Pierrot is a surveying company based in the South-East of France, in both Cannes and Mandelieu. Since beginning their business in 1965, his company has worked on over 21,000 projects in the Alpes-Maritime and surrounding areas, and they continue to work on over 800 projects per year.
The company is represented by 2 expert surveyors, David Pierrot and Robin Bruna. They understand the value in using the latest hardware and software technologies to achieve the best results for their clients. In recent years David and Robin have adopted GeoSLAM scanners into their arsenal of tools, due to their speed and precision. They began working with the ZEB Revo RT, and have since incorporated two ZEB Horizons into their business.
Pointcloud captured by CEP David Pierrot using GeoSLAM scanners
ZEB Horizon | Scanning a French villa
The company was recently tasked with completing a survey of a villa on a steep hillside, in Théoule-Sur-Mer. The goal of the project was to create a detailed topographical map of the existing building and surrounding area, working closely with an architect who will use the map to plan and conduct new construction work. As the surveying experts, they establish whether the site is suitable for the planned construction work, and the architect uses the 3D/2D vector to put together plans for the construction work.
The GeoSLAM ZEB Horizon was chosen to conduct this scan because of its speed of acquisition, precise measurements, range, and versatility. A large part of the scan took place on a steep hill leading up to the house, so a handheld scanner was the ideal choice.
The surveyor in charge of this scan, Robin Bruna, was able to walk and scan, cutting down the time it took to capture the entire area, whereas a static scanner on a tripod would have taken far longer due to the tough terrain. The entire scan was conducted using only the GeoSLAM ZEB Horizon.
The ZEB Horizon scans points at 40-50m, which allows for a much better trajectory than other mobile scanners.
The area of land scanned, including the house, totalled 8000 sq/m and the whole area was captured in just 4 scans. Each scan took approximately 10-15 minutes to complete, so the team were able to capture useable pointcloud data in approximately one hour!
The separate scans were then processed using GeoSLAM software and merged into a complete 3D pointcloud before being georeferenced. The team then took the pointcloud through a classification process to get a better understanding of the land, before beginning the creation a 3D/2D vector map in Autocad.
They also created longitudinal cuts in the cloud to provide the architect with reliable and visual information about the incline of the hill. The maps created will help the architects carry out landscape insertions and plan out new construction work to the lower part of the property.
The use of the ZEB Horizon meant that the team could not only carry out the entire scan with ease, but due to the speed of data acquisition, they were able to get the pointcloud into the post processing stage far quicker than if they had used a static scanner, thus saving them time and money.
The digitlisation of the land makes it possible for the architect to check the feasibility of construction, without needing to re-visit the area. Finally, in line with the “ordre das geomitics-experts”, David and Robin set up a process that allows the inspection of the measurement accuracy.
To learn more about some of the projects CEP David Pierrot have been involved with, visit them at www.cabinetpierrot.fr
“Billund Airport (BLL) in central Denmark is the second largest airport in the country, processing over 3 million travellers a year. Quite a few of the arriving tourists head to the original LEGOLAND resort which is situated nearby.
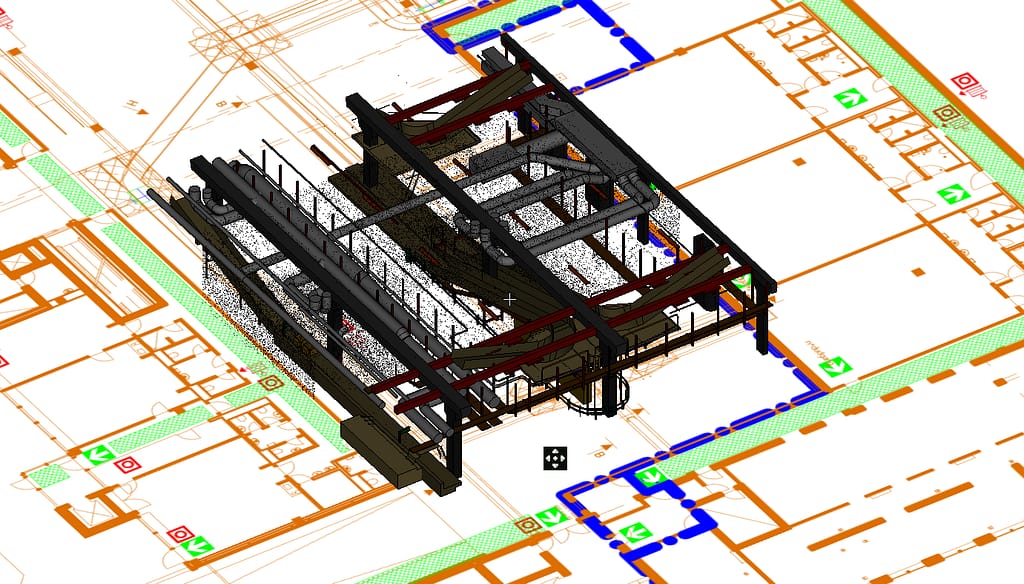
Similar to many airports, conveyor belts in the BLL departure terminal carry luggage down to the central baggage room for automated sorting before being loaded onto trolleys for the final few metres out to the waiting aircraft. With a ceiling nearly five metres high, the baggage room is a three-dimensional maze of ascending and descending conveyor belts, support structures, catwalks and HVAC piping.
A 3D model was needed to help determine if new conveyor belts could be threaded through the existing features for the expansion.
“As long as it takes to capture the scan data, that’s how long GeoSLAM Hub takes to process it. That is what is amazing about this technology“
Early in the project planning stage, BLL wasn’t sure how much detail they would need to proceed with the expansion design. We had worked extensively with the GeoSLAM ZEB Revo solution on multiple post-construction quality control jobs and were confident that the handheld device would provide an impressive level of detail in a short amount of time. In fact, it took less than 10 minutes.
After scanning the space, the data was imported into GeoSLAM Hub and the pointcloud was processed in just ten minutes as well.
To further demonstrate the detail of the data collection, LIFA sent a 30m2 section of the point cloud to a subcontractor for feature extraction and modelling. We had quite an amazing set of data, The 3D model included floors, walls, ceiling, conveyor belts, beams, cable trays, lights, railings, pipes, and structural features.
3D model of Billund baggage handling area
Close up 3D model of Billund baggage handling area
BLL officials were so impressed with the level of detail captured by the ZEB Revo, the information formed part of a more detailed model for a tender to upgrade and expand the belts and sorting for arriving baggage.
As the adoption of SLAM rockets, and new applications for mobile data capture are discovered each day the value of SLAM is being proven across businesses of all shapes and sizes. GeoSLAM technology continues to break barriers and the ever-increasing profile of SLAM users grows each day.
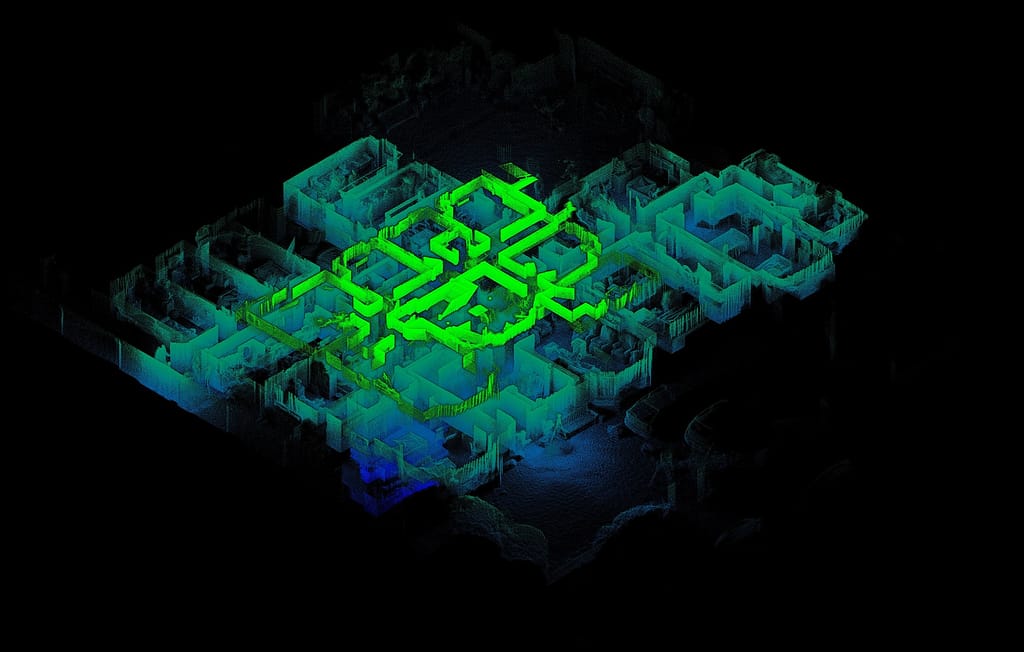
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
World Trade Center Subway Station
Location:New York, USA ZEB Scanner: ZEB Horizon Scan time:10 Minutes
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Bloom Cloud Engine is a powerful on-premise point cloud editor ideal for use in Design, Fabrication, and Construction applications. Easy to deploy across your project team, BloomCE allows users to optimize and condition the point cloud data from all reality capture modalities, providing the fundamentals for Asset Management and Digital Twin project requirements.
Blacklight, based in Romania, focuses on information technology that captures, measures and visualises data used in various fields of activity through providing valuable solutions.
Cybernetech Corporation, based in Japan, is a specialised trading company that offer advanced information and communication equipment and geospatial information technology.
Seiler Instrument is an American company that specialises in distributing surveying software and instruments serving industries such as surveying, engineering and construction.
Favre, Développement & Foresterie, based in Switzerland, are experts in geomatics and work with public and private landowners for forest management and environmental heritage.
3DT Digital Manufacturing is an Australian company that use the latest technology to adapt to changes in real time. It aims to help their customers become more efficient and productive.
Sigma Mascot, based in Hong Kong, provides solutions for 3D Laser Scanning, Geospatial systems and BIM services for industries such as Forestry, Construction and Real Estate.
Precision Laser & Instrument is an American company that offers comprehensive positioning solutions for the Construction, Survey, and GIS industries. They ensure high returns on investments and business success.
Export your point cloud into a range of formats, including LAZ, LAS, PLY and TXT. Datasets can also be exported as structured or unstructured E57 files, both of which include embedded panoramic images.
Surface normals at each point can now be computed from PLY and E57 formats, allowing users to export colourised data and create a high-quality polygonal mesh in third party software .
Stop and Go Georeferencing
Known control points are captured during a scan and automatically compared and matched to the associated coordinates during the processing stage in Connect. A rigid and/or a non-rigid adjustment can be made to the dataset and an accuracy report is exported, highlighting how successful the transformation was. Users can now view and manipulate the processing parameters to ensure a more accurate match between points.
Manual Alignment
Align multiple scans using a combination of manual and automatic processes. This workflow can be performed on two or more scans in the same project. Users have a choice to export the aligned scans separately or as a single merged point cloud.
JP Interactive Viewer
Leverage your GeoSLAM data by integrating JP Interactive Viewer into your workflows. JPIV allows you to unlock the full potential of your reality capture data and distribute actionable insights across your teams.
Our support team will be available for GeoSLAM Care customers on:
Monday 26th, 8 am – 4 pm (GMT)
Tuesday 27th, 8 am – 4 pm (GMT)
Wednesday 28th – 31st December – standard support hours
Monday 2nd January, 8 am – 4 pm (GMT)
From Tuesday 3rd January – standard support hours resume
Test pop-up
fsikajntgfitdshagklndsakj;gnjkdasklngklsa
Click here to view the release notes.
Autodesk Recap
Autodesk Recap contains tools for the manipulation and interpretation of high quality point cloud data and to aid designers and engineers in their creation of 3D models for real-world projects and assets (e.g. buildings and other infrastructure). It’s integrated design features help to streamline workflows, for example Scan to BIM. Recap is used to create initial design projects that users can then take into other Autodesk modules (e.g. Revit, Navisworks, AutoCAD).
Autodesk Navisworks
Autodesk Navisworks is a comprehensive project review solution that supports co-ordination, analysis and communication of design intent and constructability. The software can be used as a common data environment (CDM) for multidisciplinary design data created in a broad range of Building Information Modelling (BIM) packages. Using the tools within Navisworks, users can anticipate and minimise and potential problems between the physical building and the structural model.
Autodesk Revit
Autodesk Revit is a building information modelling (BIM) software. It contains tools which allows for planning and tracking throughout the building’s lifecycle. The software also allows multiple disciplines to collaborate more efficiently and make more informed decisions early in the design process. As GeoSLAM’s hardware allows for quick data capture, the equipment can be used to scan any existing buildings with the purpose of using the data to produce a digital twin.
Orbit GT allows users to capture and manage available 3D data (LiDAR data and imagery), extract a range of features for map production and make data sharable. All Orbit modules are ready to be used with 3D data from indoor, oblique, UAS and mobile mapping projects with other extensions that can be added to the Publisher and Orbit Cloud. Orbit can be used with the ZEB Discovery solution.
ContextCapture
ContextCapture is a reality modelling tool, allowing for the import of any point cloud and imagery data for the creation of high resolution reality meshes. These realistic meshes are accurate representation in 3D with high resolution RGB values of any scanned environment. By using GeoSLAM data in ContextCapture the users are able to create indoor reality meshes, which has been never possible before.
Microstation
Microstation is a 2D/3D software for designing building and infrastructure projects. It includes building information modelling (BIM) tools to document and assess any type of asset throughout its lifecycle. GeoSLAM solutions are often used in Microstation in the underground mining sector and to assess the current stage of any built environment, update the design model, and generate BIM information.
Deswik
With the GeoSLAM Connect stop-and-go georeferencing feature, users can easily georeference headings from known positions and map for analysis of overbreak, underbreak, undercutting and blast roughness calculations. This information is used within Deswik Mapping to analyse headings and levels.
Esri
Outputs from GeoSLAM’s solutions can be input to Esri’s GIS programs and apps, including ArcPro, ArcDesktop, ArcGIS Online and ArcScene. Join point clouds with local geodata or classify and edit scans based on their geography and statistics.
Micromine is a detailed and diverse mining software that provides solutions including modelling, estimation, design, optimisation and scheduling. Once data is exported from Connect it can be imported into Micromine and easily converted into wireframes. These can be used in Micromine for further studies into volumetric slicing, over and underbreak analysis, geologic modelling, face mapping and many more.
Terrasolid provides tools for data processing of airborne and mobile mapping LiDAR data and imagery. It includes different modules for tasks like data manipulation, calibration, georeferencing, point cloud classification, modelling and many more. It is a very powerful tool for a variety of industries, surveyors, civil engineers, planners, designers. Full, UAV or lite versions of Terrasolid modules are available for both MicroStation or Spatix software. All GeoSLAM products are compatible with Terrasolid and GeoSLAM data can be enhanced and edited with this software.
Floorplanner
Floorplanner allows you to draw accurate 2D floorplans within minutes and decorate with over 150,000 items from kitchen appliances to tables and chairs. Data is exported from GeoSLAM Connect in PNG file format with a scale of 1cm per 1 pixel and can be taken into Floorplanner.
Unity
GeoSLAM 3D point cloud data can be imported into Unity 3D Game Engine to generate interactive 3D scenes, where users can create 3D BIM models with textures and explore the space in 3D photorealistic environments.
Unreal Engine
Although Unreal Engine is mainly built for developing games, increasingly users are starting to use it to develop VR applications for understanding the current conditions of buildings, infrastructure and similar. Unreal Engine with a point cloud plugin can be used to visualise GeoSLAM point clouds in VR, which allows for collaboration, simulation and the understanding of current conditions of any scanned environment. Additionally, Unreal Engine tools are completely free.
Veesus Arena4D
Arena4D is a software package for marking up, annotating and editing 3D point cloud data containing a various export capabilities. It has a powerful and simple to use animation package which allows users to visualise massive point clouds in a simple way. GeoSLAM data can be simply uploaded and used in this package for the assessment of the current conditions of any structure, comparing differences between captured data (as built) to designed model (as designed).
Pointfuse
Pointfuse generates 3D meshes from point cloud data and classifies them to building ceilings, walls, windows and other features in IFC format. By using GeoSLAM data with Pointfuse users can very quickly create a classified BIM model with minimal manual input or expertise needed.
MineRP
MineRP has a Spatial DB that uses GeoSLAM data to represent visually the real environment of the underground mine. The software uses other data layers to overlay information on the digital landscape for decision making and tracking.
Pointerra
Pointerra provides a powerful cloud based solution for managing, visualising, working in, analysing, using and sharing massive 3D point clouds and datasets. Pointerra allows users to simply visualise and interrogate GeoSLAM data from anywhere.
Nubigon
Nubigon is a software solution that allows users to seamlessly interact with large point clouds and create visualisations and animations. Take your GeoSLAM point cloud data into Nubigon to create eye-catching flythrough videos.
Here is an example of a visualisation created in Nubigon using GeoSLAM point cloud data:
SLAM Environmental Pre-sets
Common data capture scenarios, such as UAV, outdoor, indoor, linear, and vehicle, have been characterised in Connect and data processing pre-sets for each environment have been defined. These can be selected at the beginning of the data processing stage allowing this process to be highly simplified.
Closed and Open Loop Georeferencing
Both methods match the scan data from a ZEB Locate system with the GPS data collected from the antenna to georeference the point cloud. When a scan starts and ends in the same place, this is classed as “closed loop”. “Open loop” is when the start and end position of a scan are in different locations. Standard SLAM practices apply to both methods of data collection.
Open Loop SLAM for the ZEB Locate is available on request – let’s talk about it.
Stop and Go Alignment
Common static points are captured during several scans meaning that these datasets can be automatically aligned. A single point cloud is then exported as if the data was captured in a single scan.
Floor Slices
Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at a given height above the floor as defined in the processing stage.
Change Detection
Mostly used in the construction industry, multiple point clouds can be compared and any areas that have changed are automatically highlighted. Point clouds can also be compared with CAD models – for instance to track progress on a construction site – and PDF reports can be generated to present this information.
Queued Processing
Import multiple .geoslam files into Connect for processing and the scans will be processed in the order they were imported. The size of the queue can be defined by the user.
Enquire about the ZEB Horizon RT
Error: Contact form not found.
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if pointcloud is coloured)
UK payment plan
UK payment plan info
USA Payment Plan
Coupling with hardware
Some SLAM software algorithms have been made available as open-source on the internet, but they are purely algorithms and not a product that you can take and use off-the-shelf. SLAM is most successful when it is tightly coupled and designed with specific hardware in mind. A generic SLAM cannot perform as well as one that has been specifically designed for a purpose.
Usage in multi-environments
Visual SLAM is closer to the way humans navigate the world, which is why it’s popular with robotic navigation. But in the same vein, vSLAM will have the same image-capture challenges as humans do, for example not being able to look into direct sunlight, or not having enough contrast between the objects picked up in the image. These can be overcome indoors, however, you may need to map a forest, tunnel or urban canyon. While SLAM technologies don’t rely on remote data (meaning you can scan areas where there is no GPS), you do need to ensure the SLAM technology you chose operate well inside, outside, in daylight and darkness.
Real-time data capture
Mapping a property is time-critical. Ideally, you want to make a single visit and gather sufficient data to create a highly accurate 3D model. Ensure the software you choose transforms 3D point cloud data into actionable information in real-time. This allows you to view and interrogate your data whilst still in the field, and make any adjustments, or collect missed data, then and there.
Flexibility and deployment
If you’re trying to map an enclosed environment (e.g. tunnel, mine) or a complex, difficult-to-access space such as a heritage building with tight stairwells and uneven floors, you need to use fully-mobile, adaptable technology. Wheel-based systems, often used with the vSLAM camera, will struggle with access. Handheld devices or LiDAR scanners that can be attached to a drone or pole and still deliver accurate results in a rugged environment are best for navigating hazardous spaces.
Speed and accuracy
While vSLAM is able to provide a qualitative high-level map and sense of the surrounding features, if you’re needing survey-quality accuracy and rich-feature tracking at a local level, you’ll need to consider LiDAR. Cameras require a high-frame-rate and high processing to reconcile data sources and a potential error in visual SLAM is reprojection error, which is the difference between the perceived location of each setpoint
and the actual setpoint.
Quality and distortion
In order to deliver the depth required for high-quality data, a number of depth-sensing cameras are needed with a strong field of view. In most cases, this isn’t possible, especially as cameras with high processing capabilities typically require larger batteries which weigh down airborne scanners, or limit the time of flight. LiDAR is both faster and more accurate than vSLAM, and can deliver detailed point clouds without expensive (and timely) camera processing.