
Our Dealers – Renewed
In this blog, we are proud to share our renewed dealers, with some brief information on their work within specific industries and where they’re located.
In this blog, we are proud to share our renewed dealers, with some brief information on their work within specific industries and where they’re located.

Ås,
Norway

Approx. 10-20 minutes per scan

250 Sq/m plots

Norwegian forests

Forestry
The SFI SmartForest is a part of the Centres for Research-based Innovation scheme of the Research Council of Norway. It aims to position Norway’s forestry sector at the forefront of digitisation by 2028. The primary goal of the 8-year research centre is to improve the efficiency of the Norwegian forestry sector by enabling a digital transformation, using innovative technologies, such as LiDAR. They aim to increase productivity, reduce environmental impacts, and review other significant climate benefits.
SmartForest are focusing on silviculture, forest operations, wood supply, and the overall digital information flow. The hope is to bring industry 4.0 to the Norwegian forestry sector by having a free flow of information and real-time communication, through innovative and enabling technologies.
The interconnectivity of data and technology will not only result in the long-term success of the forestry sector in Norway but also contribute to limiting potential environmental impacts.
LiDAR is one of the enabling technologies that will help them collect accurate data for ground truthing. The point cloud is forming a basis for deep learning models that can eventually apply to much larger mapped areas.
The forest is dense with trees, the floor is often rough terrain, and it is usually hidden beneath a thick canopy of vegetation. To capture 3D models of the forest, SmartForest need a mobile LiDAR solution that can map from the ground and a UAV-based LiDAR solution to capture properties of the tree canopy.
Data acquisition is only one part of a larger workflow that can include segmentation algorithms, allowing for further exploration of the physical attributes of individual trees such as tree height and distribution. It’s important for the data to be precise, to ensure accurate monitoring of the forest.
An obvious solution was a static-based terrestrial laser scanner (TLS), however, despite the accuracy levels being incredibly high, the speed of capture was impeded by the need for several scans in one area. As the project progresses and the need for scanning larger areas increases, TLS becomes a less likely option.
Another choice was a UAV-based solution that can capture large areas in a short period of time. Though SmartForest works with UAV to capture the forest canopy, it’s less effective at penetrating thick vegetation to collect forest floor and trunk data than it is from the ground.
After looking around the market, they opted to try mobile laser scanning as a solution that could quickly capture ground data to an accuracy high enough for their needs.
Vegetation, trunks and terrain
Trunks and terrain
Terrain
SmartForest chose GeoSLAM’s ZEB Horizon scanner for its speed of capture, ease of use, and mobility. Projecting 300,000 laser points per second with a range of up to 100 meters, the scanner produces dense point clouds of large areas, in a short period of time. The accurate point cloud includes the forest floor, debris, tree trunks, and thick vegetation.
Frequent data acquisition is a key part of SmartForests plans and GeoSLAM’s handheld LiDAR scanner, alongside UAV data capture help to achieve this. The ZEB Horizon’s ease of use makes data acquisitions a repeatable task and the high accuracy of data provides a foundation for deep learning models.
The point clouds are processed in GeoSLAM’s software package and imported in 3rd party solutions, where sophisticated algorithms are applied to segment the data. Automatic segmentation of the tree trunks allows for easier tree counts and tree segmentation provides precise forest inventory, down to the individual tree. The digital separation of trees will lead to the extraction of features such as wood quality, biomass, and other ecologically relevant variables.
Scanning with the ZEB Horizon is a very efficient way to collect ground truth. Eventually, we want to use it for large-scale mapping applications.
The long-term plan for the SFI SmartForest is to bring industry 4.0 to the Norwegian forestry industry, using emerging and enabling technologies. Handheld LiDAR scanning has been identified as an efficient way to map the forest from the ground, providing accurate point clouds which serve as the basis for deep learning research opportunities.
They hope to use GeoSLAM’s ZEB Horizon for other applications in the future, having seen the versatility of the scanner.
If you’d like to learn more about how GeoSLAM solutions can help you, submit the form below.

Last Updated on 25th October 2022 Scanning the Mutrah Souk in Muscat,… Read More »Scanning the Mutrah Souk in Muscat
Location: Norway
ZEB Scanner: ZEB Horizon
Scan time: 15 Minutes
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
Savannah,
USA
From 10-30 minutes
Varies depending on scan
Large exterior spaces
Surveying
Shamrock+, based in Savannah Georgia, provides creative and visual solutions to individuals and businesses through photography and 3D data collection services. Using UAVs, cameras, sensors and software, Shamrock+ delivers accurate representations of built environments for their clients.
Shamrock+ largely works within Architecture, Engineering and Construction (AEC), however, they also assist professionals with projects in the Real Estate sector. Their solutions include photography, progress documentation, creating 3D data visualisations, and as-built.
Shamrock+ originally used a static-based LiDAR solution to produce their 3D point clouds. Though highly accurate, they needed a faster solution for collecting data. Additionally, they needed a versatile scanner that can be mounted to UAVs and cars to capture larger areas.
As a result, Shamrock+ chose to work with GeoSLAM’s ZEB Horizon scanner.
What used to take hours to scan, is now taking us significantly less time to cover more areas.
The ZEB Horizon has significantly reduced the time needed to scan, whilst simultaneously delivering accurate data. The easy-to-use solution and simple setup mean the team could immediately begin scanning.
Many of the areas Shamrock+ capture are large exterior spaces, and the 100m range of the ZEB Horizon make it the ideal solution. The team carried out an architectural scan of an approximately 10,000 sq. ft Community Bible Church (CBC) in Savannah, GA. This project consisted of 3 individual scans of the interior building and its surrounding area, with the scan time ranging from 10 to 30 minutes.
Shamrock+ uses the ZEB Horizon laser scanner on UAVs, handheld and with GeoSLAM’s car mount accessories. The versatile solution provides Shamrock+ with the ability to switch from air based data capture to scanning large areas in a very short amount of time.
Shamrock+ has completed more than a dozen projects to date, each with its own challenges. From scanning building interiors for renovation, to mapping acres of land for topographical data, the ZEB Horizon has proven to be a tool that can overcome the challenges it has faced so far.
Shamrock+ processes the ZEB Horizon’s data using GeoSLAM Connect. They also internally integrate the point clouds into other software platforms to create 3D BIM files, floorplans, elevations, contours, and much more.
By using GeoSLAM’s technology, Shamrock+ can capture large acres of land in a short period of time. This speeds up their data collection process without sacrificing accuracy, which allows them to spend more time on creating high quality visual solutions for their clients.
If you’d like to learn more about how GeoSLAM solutions can help you, submit the form below.

FARO® Technologies, Inc. a global leader in 4D digital reality solutions, today announced the acquisition of UK-based GeoSLAM, learn more about it here.
Location: Bristol, UK
ZEB Scanner: ZEB Horizon and ZEB Vision
Total Scan time: 16 Minutes
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
Location: Belgium
ZEB Scanner: ZEB Horizon and ZEB Vision
Total Scan time: 20 Minutes
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
Location: Johor Bahru, Malaysia
ZEB Scanner: ZEB Horizon and ZEB Vision
Scan time: 5 Minutes
See the data flythrough video here.
Would you like to see a specific dataset that’s not on this page? Contact [email protected]

Available to order from today, 15th of August, the ZEB Horizon is available in real-time so users can preview data during a scan, for total confidence before leaving a site.

In this Chartered Institution of Civil Engineering Surveyors article, Dr Neil Slatcher talks all things SLAM, answering questions such as ‘What’s the difference between SLAM and traditional laser scanning?’ and ‘What kind of SLAM types are there?’.
Kansas,
USA
Approx. 20 minutes per scan
Over 1 million sq/ft per year
Buildings and Underground Oil Tanks
Surveying
The Kansas Adjutant General’s Department coordinates resources for local, state, and federal use. They also develop internal use documents for the military, including surveying building interiors to create up-to-date and accurate floorplans for military members within Kansas.
They have about 35 sites throughout the state, with some locations 100s of miles away from the headquarters. Further, the Adjutant General’s Department manages approximately 250 buildings state-wide, totaling around 2 million sq. ft. of interior space. These factors have led to some difficulties in keeping up with projects, and any changes to the buildings and layouts.
The team found that when remodelling buildings, they were having issues getting as-builts completed in time. As-builts are documents that are used to compare a building’s design plan versus its final measurements. They also provide accurate blueprints of the building, and the surrounding land, as actually constructed at the end of the project.
Being able to have one person go out to capture all of the data and have the most current floorplans, along with the accuracy of the scanners is a gamechanger
To tackle these issues, the team decided to adopt LiDAR laser scanning technology to aid them in their projects and found GeoSLAM’s ZEB Revo to be the best option. By acquiring GeoSLAM’s technology, the Kansas Adjutant General’s Departments’ goal was to scan over half of their 2 million sq. ft. of interior space every year.
The ZEB Revo is handheld, accurate and fast, providing the team with a perfect tool. In addition, the simplicity and ease of use means only one team member needs to travel to a site, when necessary. Previous methods of data capture were not as quick or accurate. The ZEB Revo data capture leads to a faster return on projects, higher levels of accuracy, and a high return on investment.
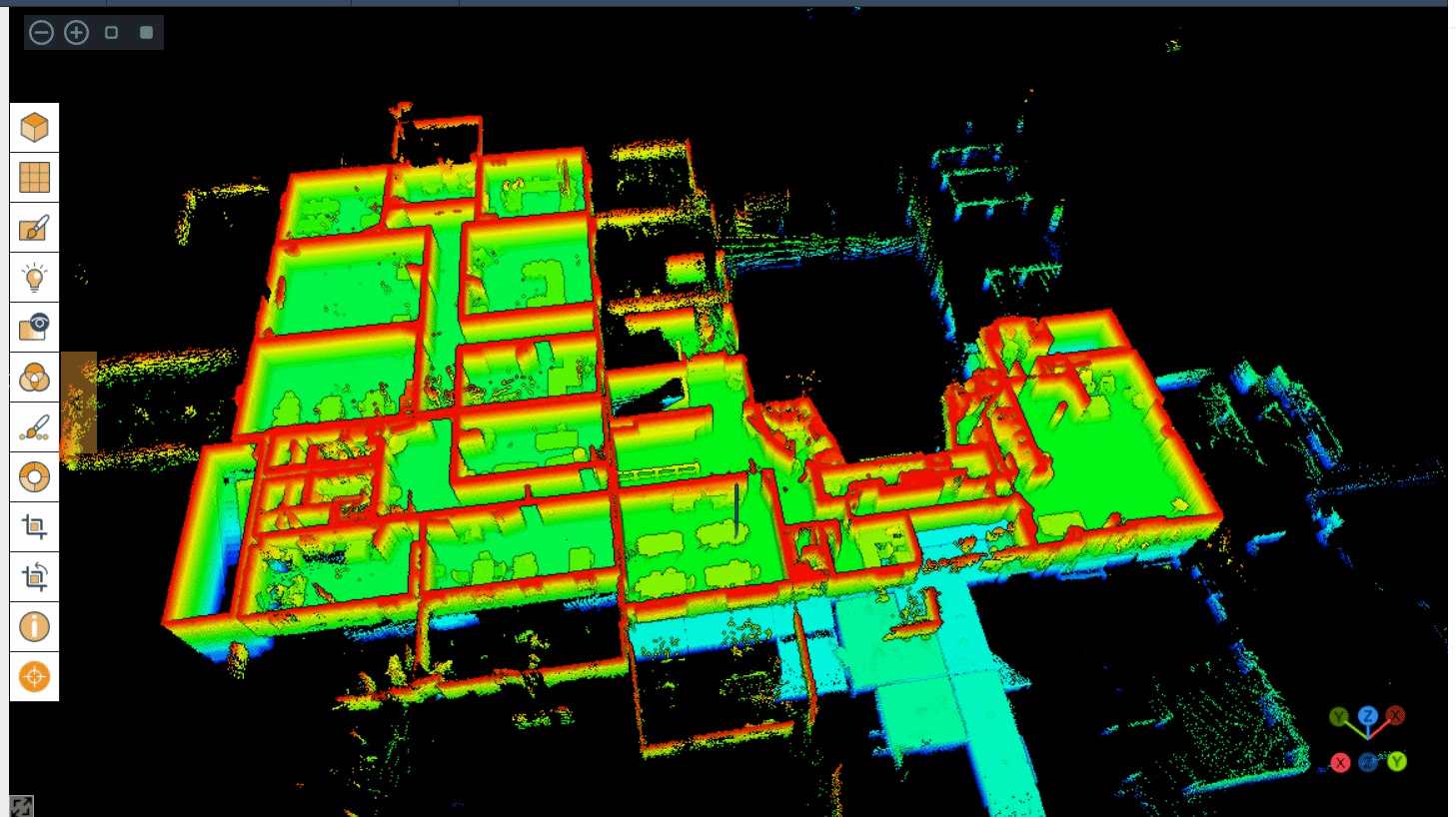
By using the ZEB Revo, the Kansas Adjutant General’s Department have updated over 1 million sq. ft. of interior space, achieving their overall goal, with just one technician visiting half of the sites per year. The speed of capture of the ZEB means that the average time it takes the team to carry out a scan is just 20 minutes. By collecting accurate measurements, they can now regularly update their GIS database, which provides up to date floorplans throughout the state.
Data from the ZEB Revo is also used to create ‘X-Ray’ views of their properties for future plans and layouts.

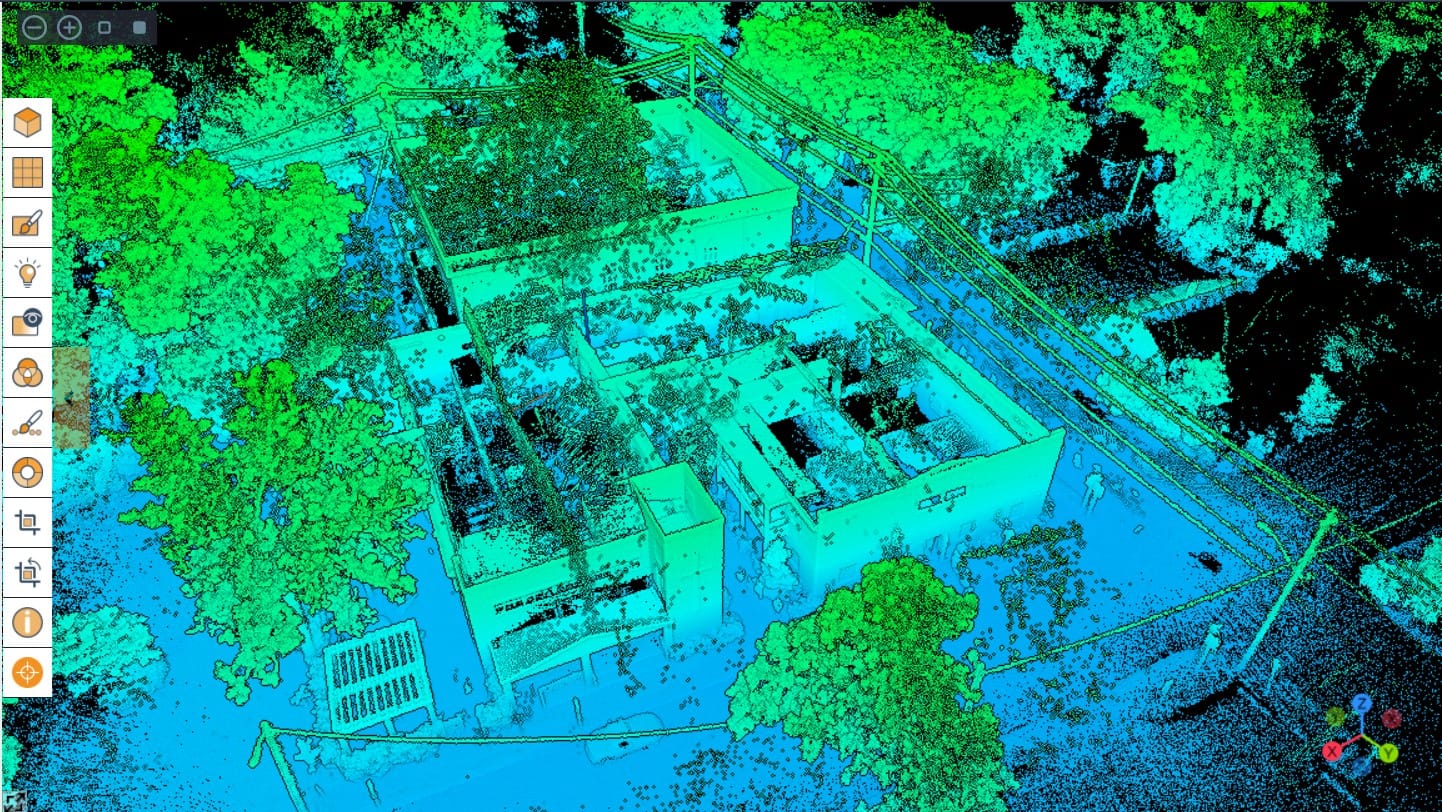
Recently, they have expanded their use of handheld LiDAR technology by acquiring a ZEB Horizon, which they use for a variety of reasons. The increased range and data capture points make the ZEB Horizon a great option for large exterior scanning. This is important to the Adjutant General’s Department as they cover land of up to 50 acres.
The Kansas Adjutant General’s Department also have tanks that contain hazardous material which they need to track carefully. Using the ZEB Horizon, they scan exterior environmental factors to figure out contour lines within their complex. This helps them work out where any spillages of hazardous material would be, should one occur.
With the ZEB Horizon, the team also carry out exterior scans for asset management. Due to the scanners ease-of-use, one engineer can attach it to a truck and drive around their complex. This enables Kansas Adjutant General’s Department to scan their entire site and keep on top of their buildings and resources.
The team are also looking to expand this by attaching the ZEB Horizon to a UAV in the future.
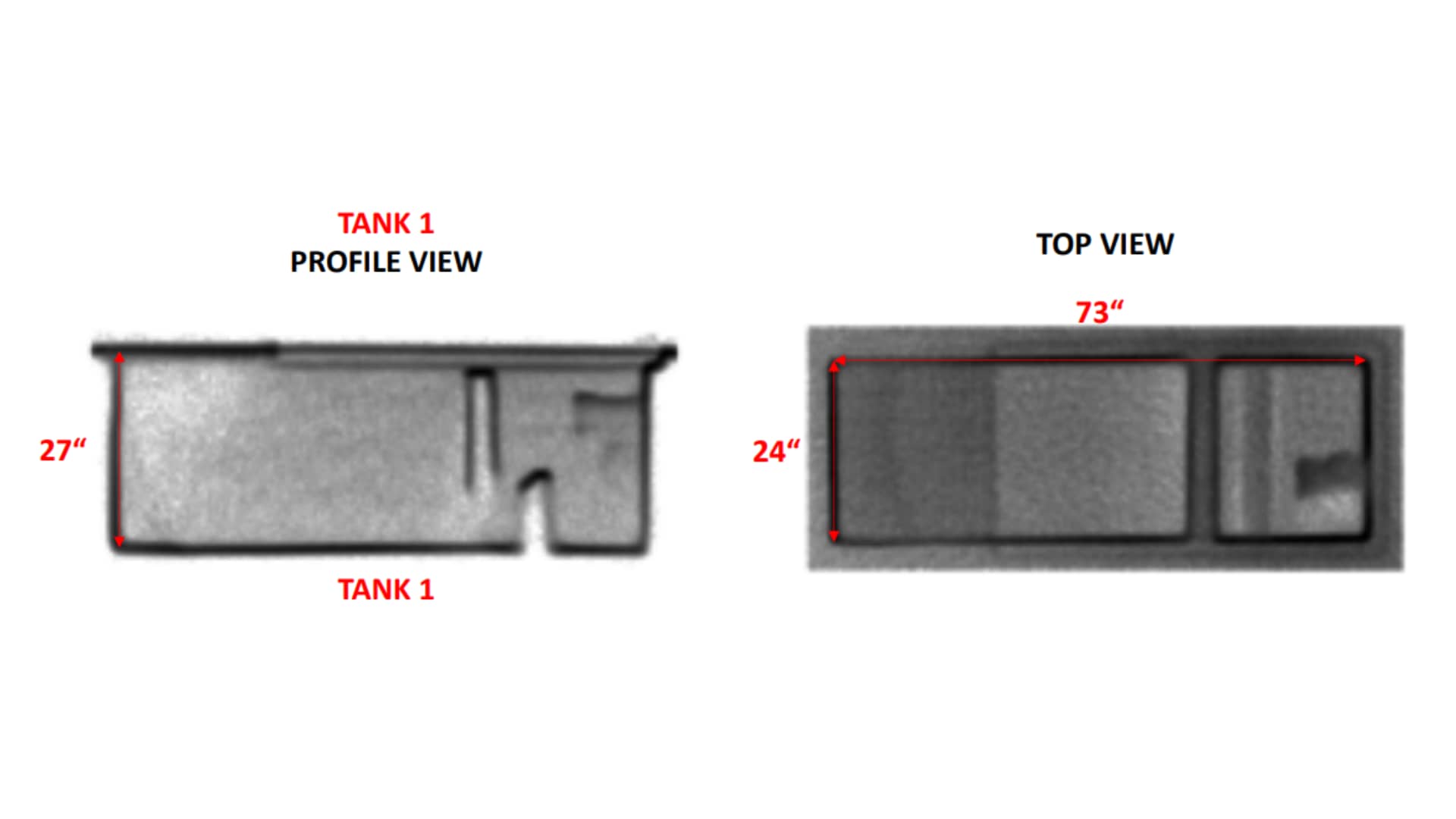
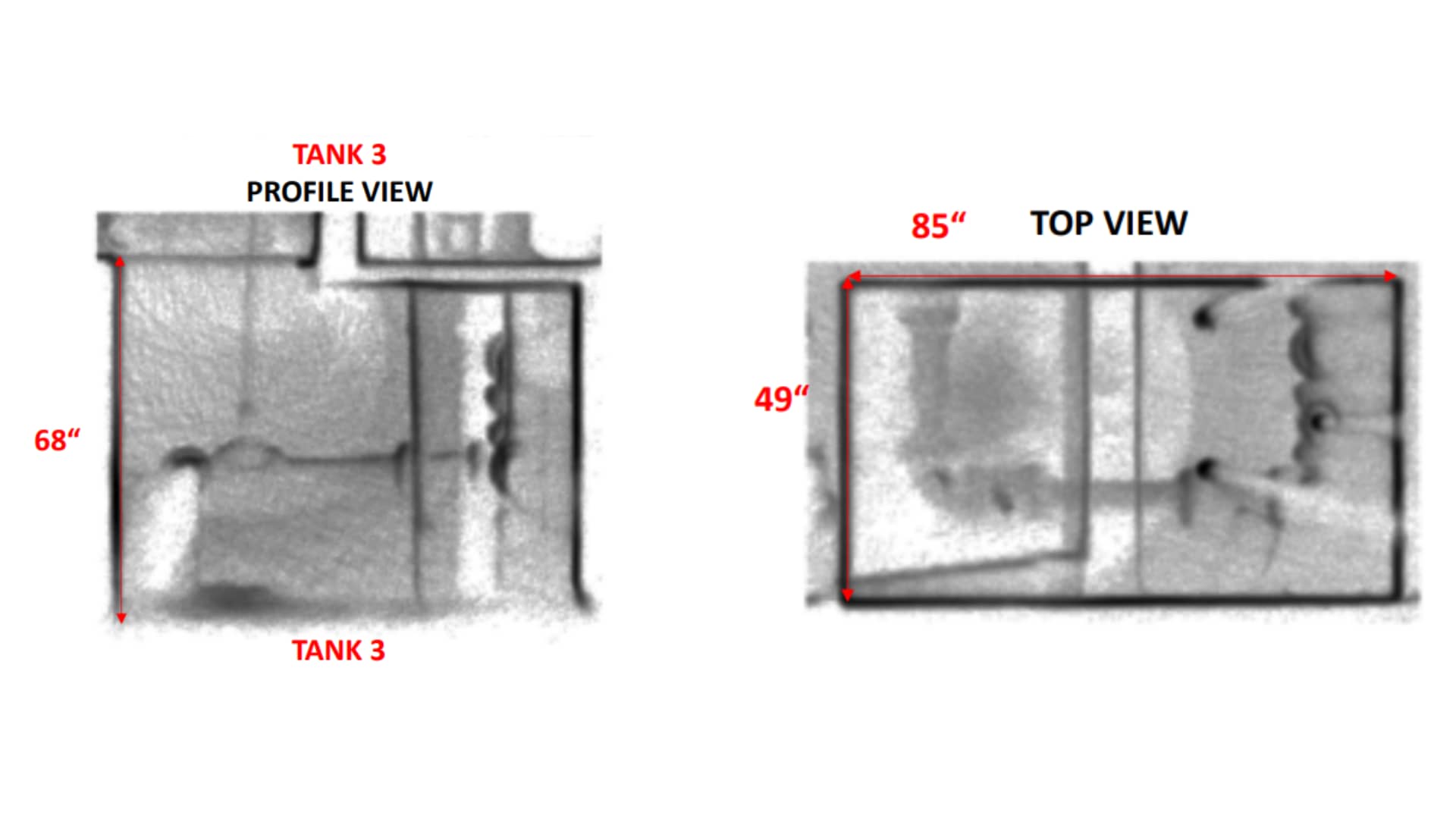
The ZEB Horizon’s time saving, and accurate scans have proven to be a cost-effective method of data capture. For example, scans of underground empty oil storage tanks showed that the Kansas Adjutant General’s Department had been over estimating the tanks collection capacity, leading to an adjustment of the servicing contract.
Since The Kansas Adjutant General’s Department acquired GeoSLAM’s technology four years ago, they have carried out approximately 2000 scans, and this number continues to rise.
Further, the contractors and architects that create as-builts are now using The Kansas Adjutant General’s Department to quality check their work for accuracy. Using GeoSLAM laser scanners, they help find errors in specifications and relay that information to the contractors.
With the help of Seiler Geospatial Division, Kansas Adjutant General’s Department have been able to significantly improve their workflow. To find out more about Seiler, click here.
If you’d like to learn more about how GeoSLAM solutions can help you, submit the form below.

Known control points are captured during a scan and automatically compared and matched to the associated coordinates during the processing stage in Connect. A rigid and/or a non-rigid adjustment can be made to the dataset and an accuracy report is exported, highlighting how successful the transformation was. Users can now view and manipulate the processing parameters to ensure a more accurate match between points.

Align multiple scans using a combination of manual and automatic processes. This workflow can be performed on two or more scans in the same project. Users have a choice to export the aligned scans separately or as a single merged point cloud.

Common data capture scenarios, such as UAV, outdoor, indoor, linear, and vehicle, have been characterised in Connect and data processing pre-sets for each environment have been defined. These can be selected at the beginning of the data processing stage allowing this process to be highly simplified.

Both methods match the scan data from a ZEB Locate system with the GPS data collected from the antenna to georeference the point cloud. When a scan starts and ends in the same place, this is classed as “closed loop”. “Open loop” is when the start and end position of a scan are in different locations. Standard SLAM practices apply to both methods of data collection.
Open Loop SLAM for the ZEB Locate is available on request – let’s talk about it.

Common static points are captured during several scans meaning that these datasets can be automatically aligned. A single point cloud is then exported as if the data was captured in a single scan.

Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at a given height above the floor as defined in the processing stage.

Mostly used in the construction industry, multiple point clouds can be compared and any areas that have changed are automatically highlighted. Point clouds can also be compared with CAD models – for instance to track progress on a construction site – and PDF reports can be generated to present this information.


Some SLAM software algorithms have been made available as open-source on the internet, but they are purely algorithms and not a product that you can take and use off-the-shelf. SLAM is most successful when it is tightly coupled and designed with specific hardware in mind. A generic SLAM cannot perform as well as one that has been specifically designed for a purpose.

Visual SLAM is closer to the way humans navigate the world, which is why it’s popular with robotic navigation. But in the same vein, vSLAM will have the same image-capture challenges as humans do, for example not being able to look into direct sunlight, or not having enough contrast between the objects picked up in the image. These can be overcome indoors, however, you may need to map a forest, tunnel or urban canyon. While SLAM technologies don’t rely on remote data (meaning you can scan areas where there is no GPS), you do need to ensure the SLAM technology you chose operate well inside, outside, in daylight and darkness.

Mapping a property is time-critical. Ideally, you want to make a single visit and gather sufficient data to create a highly accurate 3D model. Ensure the software you choose transforms 3D point cloud data into actionable information in real-time. This allows you to view and interrogate your data whilst still in the field, and make any adjustments, or collect missed data, then and there.

If you’re trying to map an enclosed environment (e.g. tunnel, mine) or a complex, difficult-to-access space such as a heritage building with tight stairwells and uneven floors, you need to use fully-mobile, adaptable technology. Wheel-based systems, often used with the vSLAM camera, will struggle with access. Handheld devices or LiDAR scanners that can be attached to a drone or pole and still deliver accurate results in a rugged environment are best for navigating hazardous spaces.

While vSLAM is able to provide a qualitative high-level map and sense of the surrounding features, if you’re needing survey-quality accuracy and rich-feature tracking at a local level, you’ll need to consider LiDAR. Cameras require a high-frame-rate and high processing to reconcile data sources and a potential error in visual SLAM is reprojection error, which is the difference between the perceived location of each setpoint
and the actual setpoint.

In order to deliver the depth required for high-quality data, a number of depth-sensing cameras are needed with a strong field of view. In most cases, this isn’t possible, especially as cameras with high processing capabilities typically require larger batteries which weigh down airborne scanners, or limit the time of flight. LiDAR is both faster and more accurate than vSLAM, and can deliver detailed point clouds without expensive (and timely) camera processing.