View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
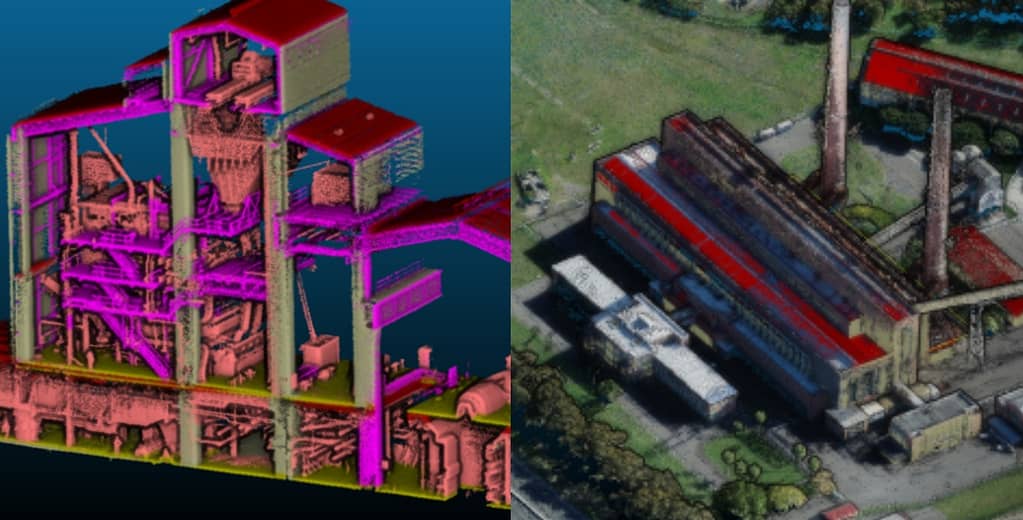
Mapping a decommissioned power station
Location
Cape Town, South Africa
Scan time
8 Hours Total
Size
Approx. 117,000 m2
Scanned
Power Station
Industry
Surveying
ZEB Family | Safely surveying a hazardous power station
All over the globe, countries are looking to nuclear and hydro renewables, not only to provide their electricity needs but to meet climate goals. This is resulting in the shutting down of coal-fossil power plants that no longer have a role to play in a fast-changing world.
Opened in 1962, the Athlone Power Station was the last coal-fired power station operating in Cape Town, South Africa when it stopped generating power in 2003. The iconic cooling towers, which were known by locals as “The two ladies of Athlone” and had long been a feature of the Cape Town landscape, were demolished several years later.
The efficient user-friendly GeoSLAM equipment enabled the team to safely and comprehensively survey this hazardous and complex plant.
Proper planning was essential as demolition can be potentially hazardous for the safety of personnel due to the plant’s age-structure, and onsite teams often having to operate across split levels, in total darkness. The removal of contaminated waste can be equally challenging. Cost is also a major factor and companies responsible for shutting down plant are continuously looking at ways to be cost effective while providing a reliable, fast and efficient service.
Aurecon, a global engineering, design and advisory company, won the tender from the City of Cape Town to project manage the site for the final stage of decommission. This involved surveying the plant whilst stripping, clearing and removing unused material, redundant equipment and certain historical structures. Their task also included securing all remaining structures, leaving the site in a secure state and registering servitudes for remaining bulk services. Aurecon found Athlone to be a challenging project due to accessibility issues and lack of light. Also, because of the Power Station’s historical importance, salvaging certain unique equipment had to be considered. The team needed a simple and effective solution that could accurately map the site quickly while keeping them safe in a tough environment.
Aurecon chose to work with mobile LiDAR scanners so that the historians, structural engineers and environmentalists could have the data they needed, without having to enter the potentially dangerous site. For the Athlone project, GeoSLAM’s ZEB Revo RT scanner and ZEB Pano camera were used, as well as theZEB Horizon and ZEB Cam. The building’s interior and exterior were scanned with the ZEB scanners The two data sets were merged to provide a full 3D point cloud of the entire building.
Using the Pano, the team generated photos that were incorporated inside the point cloud, so that the offsite survey team could have greater visualisation of the site to feedback commentary. The efficiency of the scanners and speed of capture meant that unlike other scanning methods, the team could repeatedly capture the site. This meant that decisions and assessments could be taken frequently, without the need for lots of people to visit the dangerous site.
In total, the whole facility was scanned in three days with data sets processed overnight, a total of eight hours. The combined datasets were available within a week, which enabled Aurecon’s modellers to commence work on the classification of components in the power station.
The final 3D point cloud representation of the interior of the power station enabled the engineering team to assess and quantify the amount of salvage and scrapped material to be removed from the site, and to plan the logistics of the removal in context with the physical shape and size of the existing building.
The accurate 3D model equipped the stakeholders with information that allowed them to safely and precisely analyse for activities such as material quantification, condition assessment and the preparation of decommissioning method statements.
With increasing awareness of LiDAR technology, its applications are becoming more diverse. From helping to prevent natural disasters to mapping historic caves and restoring architectural wonders, our ZEB laser scanners have been involved in a range of interesting projects over the past 12 months.
Referencing using control points
What are control points?
Control points are points within a given area that have known coordinates. They are a key tool in the geospatial industry and can be utilised in a variety of ways, including georeferencing point clouds and aligning aerial images to terrestrial data. By using control points, surveyors are able to accurately map larger areas and position overlapping surveys of an area together. They can also be used in non-geospatial industries, such as construction and mining, to show clear temporal comparisons between multiple surveys of the same area. This method of georeferencing is also referred to as adjust to control.
Previously, checkerboards and spherical targets have been used as control markers – these items are captured in surveys and can be identified for georeferencing or aligning. The main drawback with these methods is that they rely heavily on human interpretation when processing, meaning that the processed datasets may be susceptible to an increased amount of error.
When capturing handheld surveys, GeoSLAM systems are able to collect reference points. These can then be matched with known control points to reference scans and increase the level of accuracy.
What makes GeoSLAM referencing different?
More accurate: GeoSLAM scanners are used with known control points and survey grade pins, rather than more traditional moveable targets. This reduces the margin of error within point clouds.
Save time: using known survey control points means there is no need to manually position individual targets before every scan. Data capture can then be repeated regularly, faster, easier and with no concerns that reference points are captured in different places each time.
Safer: in dangerous or inaccessible areas, targets are not required to be physically positioned on pre-defined control points prior to each scan. This reduces the time exposed to hazards and unsafe areas.
Industries using control points
Geospatial
Easily reference point clouds and produce reports highlighting accuracy values.
Mining
Regularly monitor site operations (e.g. stockpiles) and hazards.
Construction
Compare changes over time and map progress onto predetermined CAD/BIM models.
Using control points with GeoSLAM
Capture
All GeoSLAM ZEB systems are able to capture reference points using the reference plate accessory. These reference points can simply be measured by remaining stationary for periods during a scan and will be recognised during the processing stage. Points can be captured from a horizontal or vertical position, depending on which ZEB system is used, making it easier than ever to georeference datasets.
Process
Using the Stop & Go Georeferencing workflow in GeoSLAM Connect, datasets can be automatically referenced through a rigid or non-rigid transformation.
Rigid Transformation
Scans are rotated and adjusted and reference points are matched to the known control points without changing the scale factor. A single transform is applied to every data point in the point cloud.
Non-Rigid Transformation
The scale factor of datasets is altered to suit the control points – every data point is moved to a new position; this means the relative positions of these points also changes. This method is better suited for poor SLAMenvironments.
A clean georeferenced point cloud is produced using both methods. An accuracy report of the transformation is also generated and includes an RMS error value.
Point clouds with endless possibilities
Once georeferenced using control points, point clouds can be optimised further using leading third party software:
Comparisons with existing CAD/BIM models
Point cloud to point cloud registration showing changes over time within a given area
CAD/BIM model creation
For more information about our third party partnerships, head to our integrations page.
Case Study
Mapping hazardous mines under intense time constraints
Beck Engineering, an Australian mining engineering consultancy specialising in mining and rock mechanics analysis, needs to rapidly map mines under intense time constraints using versatile technology which is adaptable to any environment. GeoSLAM’s handheld mobile mapping solution was chosen as it is compact, portable and delivers a high level of accuracy. With GeoSLAM’s “go-anywhere” 3D technology in hand, Beck Engineering has been able to supply invaluable data regarding the direct effects of mining to better understand the implications of a deforming rock mass. Beck Engineering is now able to accurately measure the shape of an excavation or tunnel over time. As a result, tunnels are safer, better designed and more cost efficient.
We have continued to use GeoSLAM products as they have proven to be affordable, lightweight and sufficiently robust devices for their application underground. GeoSLAM continues to produce a high-quality device that is at the forefront of practical mobile laser scanning devices. – Evan Jones, Senior Rock Mechanics Engineer at Beck
Discovered in 1804 by Bernard Weyer in the heart of Virginia, Grand Caverns (formerly Weyer’s Cave) is the oldest show cave in the USA. During the US civil war, the cave was used by both Confederate and Union soldiers as part of the Valley campaign, during which time over 230 soldiers signed their names on to the cave walls. More recently, the cave has become a huge tourist attraction, due to its beauty, location and being surrounded by scenic trails for hiking, running, and biking, but it has also captured the attention of the scientific community because of recent discoveries of new passages and the rock formation changes over time.
The town of Grottoes (where the show cave is located) partnered with Angel A. Garcia Jr. and his students from James Madison University to create a 3D map of the cave. The 3D point cloud is being used to measure Speleothems, monitor the human impact on the cave, create 3D printed models and to celebrate the show cave’s extensive history, shining a light on its geoheritage. In addition, it is a fantastic opportunity for the undergraduate students of JMU to get hands on experience with the handheld LiDAR scanner and the data it outputs.
Angel A. Garcia Jr. chose GeoSLAM’s ZEB Horizon scanner to take on the task of mapping both the parts of the cave open to the public and the recently discovered, vast passages. He and his students capitalise on the speed of capture and accuracy of the scanner to review and analyse data in a quick and efficient manner.
With the LiDAR we’ll be able to get into corners and see what hasn’t been looked at for a long time.
Mobile Mapping with the ZEB Horizon
Having originally purchased the ZEB Horizon back in February 2021 to collaborate and share data with partners scanning caves using ZEB devices in Puerto Rico, Professor Garcia began to see the potential and opportunities the scanner offered. Fast, accurate and handheld data capture opens a way to map an area without the need to GPS or complicated setups. In addition, the scanners ease of use means that undergraduate students can be involved in the project with limited to no training.
Since beginning to use the ZEB Horizon, interest in Professor Garcia’s work with the SLAM scanner has escalated, and he has subsequently been invited to other universities to run workshops. In April 2021, he was approached by Grand Caverns to map the historic show cave.
The public area of the cave is approximately 500 meters in length, 30 meters high and has stairways in places, so it is quite a large area to capture. Professor Garcia and his students were able to capture the entire public area in approximately 12-15 minutes, by simply walking and scanning. He pointed out that a terrestrial laser scanner would be able to capture the public part of the cave, but it would take days, not minutes, and due to the uneven surfaces of the non-public area of the cave, it would be impossible to get a tripod-based system down there. Alternatively, you could measure a cave using a distometer, but this could take months, if not years to complete.
The ZEB Horizon was able to give them a quick accurate scan in 12 minutes, so the students could get to work reviewing the data for their various projects.
It’s going be able to detect the stalagmites, the stalactites and it’s even going to be able to detect the cave shield because it’s that precise.
The data is being processed using GeoSLAM Hub, and Draw is being utilised by the team to accurately measure the speleothems over time. The students can see the orientation, thickness and gather measurements using the LiDAR information alone. They are also hoping to use Draw to understand accurate dimensions of the cave. Furthermore, the 3D point cloud is being used as a base to 3D print the cave within a rectangular block, for further research purposes.
The team continued to scan the cave over the summer, and Professor Garcia is working with the caving/spelunking community of experts to begin capturing the more problematic and recently discovered new passages of the cave. These areas have not designed for the public at the moment, so there are uneven surfaces and narrow corridors, but due to the ZEB Horizons mobility, capturing previously unseen parts of cave will be quick and safe.
Professor Garcia concludes by saying that the 3D model will provide an opportunity for those who can’t physically enter the caverns, to learn what they are all about.
Zach Thomas, Lorelei Dellevedora, Lily Whitman and Angel A. Garcia Jr.
Being able to seamlessly transition through an environment plays a large part in mobile 3D laser mapping. Whether that’s traversing from outside to inside, room to room, above ground to underground or through a difficult area such as forests or woods.
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Christ the Redeemer
Location:Rio De Janeiro, Brazil ZEB Scanner: ZEB Horizon Scan time:45 Minutes
The external of this scan was captured with the DJI M600 using GeoSLAM’s UAV mount, and the internal was captured handheld using the ZEB Horizon.
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Would you like to see a specific dataset that’s not on this page? Contact [email protected]
GeoSLAM Sample Data
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Bloom Cloud Engine is a powerful on-premise point cloud editor ideal for use in Design, Fabrication, and Construction applications. Easy to deploy across your project team, BloomCE allows users to optimize and condition the point cloud data from all reality capture modalities, providing the fundamentals for Asset Management and Digital Twin project requirements.
Blacklight, based in Romania, focuses on information technology that captures, measures and visualises data used in various fields of activity through providing valuable solutions.
Cybernetech Corporation, based in Japan, is a specialised trading company that offer advanced information and communication equipment and geospatial information technology.
Seiler Instrument is an American company that specialises in distributing surveying software and instruments serving industries such as surveying, engineering and construction.
Favre, Développement & Foresterie, based in Switzerland, are experts in geomatics and work with public and private landowners for forest management and environmental heritage.
3DT Digital Manufacturing is an Australian company that use the latest technology to adapt to changes in real time. It aims to help their customers become more efficient and productive.
Sigma Mascot, based in Hong Kong, provides solutions for 3D Laser Scanning, Geospatial systems and BIM services for industries such as Forestry, Construction and Real Estate.
Precision Laser & Instrument is an American company that offers comprehensive positioning solutions for the Construction, Survey, and GIS industries. They ensure high returns on investments and business success.
Export your point cloud into a range of formats, including LAZ, LAS, PLY and TXT. Datasets can also be exported as structured or unstructured E57 files, both of which include embedded panoramic images.
Surface normals at each point can now be computed from PLY and E57 formats, allowing users to export colourised data and create a high-quality polygonal mesh in third party software .
Stop and Go Georeferencing
Known control points are captured during a scan and automatically compared and matched to the associated coordinates during the processing stage in Connect. A rigid and/or a non-rigid adjustment can be made to the dataset and an accuracy report is exported, highlighting how successful the transformation was. Users can now view and manipulate the processing parameters to ensure a more accurate match between points.
Manual Alignment
Align multiple scans using a combination of manual and automatic processes. This workflow can be performed on two or more scans in the same project. Users have a choice to export the aligned scans separately or as a single merged point cloud.
JP Interactive Viewer
Leverage your GeoSLAM data by integrating JP Interactive Viewer into your workflows. JPIV allows you to unlock the full potential of your reality capture data and distribute actionable insights across your teams.
Our support team will be available for GeoSLAM Care customers on:
Monday 26th, 8 am – 4 pm (GMT)
Tuesday 27th, 8 am – 4 pm (GMT)
Wednesday 28th – 31st December – standard support hours
Monday 2nd January, 8 am – 4 pm (GMT)
From Tuesday 3rd January – standard support hours resume
Test pop-up
fsikajntgfitdshagklndsakj;gnjkdasklngklsa
Click here to view the release notes.
Autodesk Recap
Autodesk Recap contains tools for the manipulation and interpretation of high quality point cloud data and to aid designers and engineers in their creation of 3D models for real-world projects and assets (e.g. buildings and other infrastructure). It’s integrated design features help to streamline workflows, for example Scan to BIM. Recap is used to create initial design projects that users can then take into other Autodesk modules (e.g. Revit, Navisworks, AutoCAD).
Autodesk Navisworks
Autodesk Navisworks is a comprehensive project review solution that supports co-ordination, analysis and communication of design intent and constructability. The software can be used as a common data environment (CDM) for multidisciplinary design data created in a broad range of Building Information Modelling (BIM) packages. Using the tools within Navisworks, users can anticipate and minimise and potential problems between the physical building and the structural model.
Autodesk Revit
Autodesk Revit is a building information modelling (BIM) software. It contains tools which allows for planning and tracking throughout the building’s lifecycle. The software also allows multiple disciplines to collaborate more efficiently and make more informed decisions early in the design process. As GeoSLAM’s hardware allows for quick data capture, the equipment can be used to scan any existing buildings with the purpose of using the data to produce a digital twin.
Orbit GT allows users to capture and manage available 3D data (LiDAR data and imagery), extract a range of features for map production and make data sharable. All Orbit modules are ready to be used with 3D data from indoor, oblique, UAS and mobile mapping projects with other extensions that can be added to the Publisher and Orbit Cloud. Orbit can be used with the ZEB Discovery solution.
ContextCapture
ContextCapture is a reality modelling tool, allowing for the import of any point cloud and imagery data for the creation of high resolution reality meshes. These realistic meshes are accurate representation in 3D with high resolution RGB values of any scanned environment. By using GeoSLAM data in ContextCapture the users are able to create indoor reality meshes, which has been never possible before.
Microstation
Microstation is a 2D/3D software for designing building and infrastructure projects. It includes building information modelling (BIM) tools to document and assess any type of asset throughout its lifecycle. GeoSLAM solutions are often used in Microstation in the underground mining sector and to assess the current stage of any built environment, update the design model, and generate BIM information.
Deswik
With the GeoSLAM Connect stop-and-go georeferencing feature, users can easily georeference headings from known positions and map for analysis of overbreak, underbreak, undercutting and blast roughness calculations. This information is used within Deswik Mapping to analyse headings and levels.
Esri
Outputs from GeoSLAM’s solutions can be input to Esri’s GIS programs and apps, including ArcPro, ArcDesktop, ArcGIS Online and ArcScene. Join point clouds with local geodata or classify and edit scans based on their geography and statistics.
Micromine is a detailed and diverse mining software that provides solutions including modelling, estimation, design, optimisation and scheduling. Once data is exported from Connect it can be imported into Micromine and easily converted into wireframes. These can be used in Micromine for further studies into volumetric slicing, over and underbreak analysis, geologic modelling, face mapping and many more.
Terrasolid provides tools for data processing of airborne and mobile mapping LiDAR data and imagery. It includes different modules for tasks like data manipulation, calibration, georeferencing, point cloud classification, modelling and many more. It is a very powerful tool for a variety of industries, surveyors, civil engineers, planners, designers. Full, UAV or lite versions of Terrasolid modules are available for both MicroStation or Spatix software. All GeoSLAM products are compatible with Terrasolid and GeoSLAM data can be enhanced and edited with this software.
Floorplanner
Floorplanner allows you to draw accurate 2D floorplans within minutes and decorate with over 150,000 items from kitchen appliances to tables and chairs. Data is exported from GeoSLAM Connect in PNG file format with a scale of 1cm per 1 pixel and can be taken into Floorplanner.
Unity
GeoSLAM 3D point cloud data can be imported into Unity 3D Game Engine to generate interactive 3D scenes, where users can create 3D BIM models with textures and explore the space in 3D photorealistic environments.
Unreal Engine
Although Unreal Engine is mainly built for developing games, increasingly users are starting to use it to develop VR applications for understanding the current conditions of buildings, infrastructure and similar. Unreal Engine with a point cloud plugin can be used to visualise GeoSLAM point clouds in VR, which allows for collaboration, simulation and the understanding of current conditions of any scanned environment. Additionally, Unreal Engine tools are completely free.
Veesus Arena4D
Arena4D is a software package for marking up, annotating and editing 3D point cloud data containing a various export capabilities. It has a powerful and simple to use animation package which allows users to visualise massive point clouds in a simple way. GeoSLAM data can be simply uploaded and used in this package for the assessment of the current conditions of any structure, comparing differences between captured data (as built) to designed model (as designed).
Pointfuse
Pointfuse generates 3D meshes from point cloud data and classifies them to building ceilings, walls, windows and other features in IFC format. By using GeoSLAM data with Pointfuse users can very quickly create a classified BIM model with minimal manual input or expertise needed.
MineRP
MineRP has a Spatial DB that uses GeoSLAM data to represent visually the real environment of the underground mine. The software uses other data layers to overlay information on the digital landscape for decision making and tracking.
Pointerra
Pointerra provides a powerful cloud based solution for managing, visualising, working in, analysing, using and sharing massive 3D point clouds and datasets. Pointerra allows users to simply visualise and interrogate GeoSLAM data from anywhere.
Nubigon
Nubigon is a software solution that allows users to seamlessly interact with large point clouds and create visualisations and animations. Take your GeoSLAM point cloud data into Nubigon to create eye-catching flythrough videos.
Here is an example of a visualisation created in Nubigon using GeoSLAM point cloud data:
SLAM Environmental Pre-sets
Common data capture scenarios, such as UAV, outdoor, indoor, linear, and vehicle, have been characterised in Connect and data processing pre-sets for each environment have been defined. These can be selected at the beginning of the data processing stage allowing this process to be highly simplified.
Closed and Open Loop Georeferencing
Both methods match the scan data from a ZEB Locate system with the GPS data collected from the antenna to georeference the point cloud. When a scan starts and ends in the same place, this is classed as “closed loop”. “Open loop” is when the start and end position of a scan are in different locations. Standard SLAM practices apply to both methods of data collection.
Open Loop SLAM for the ZEB Locate is available on request – let’s talk about it.
Stop and Go Alignment
Common static points are captured during several scans meaning that these datasets can be automatically aligned. A single point cloud is then exported as if the data was captured in a single scan.
Floor Slices
Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at a given height above the floor as defined in the processing stage.
Change Detection
Mostly used in the construction industry, multiple point clouds can be compared and any areas that have changed are automatically highlighted. Point clouds can also be compared with CAD models – for instance to track progress on a construction site – and PDF reports can be generated to present this information.
Queued Processing
Import multiple .geoslam files into Connect for processing and the scans will be processed in the order they were imported. The size of the queue can be defined by the user.
Enquire about the ZEB Horizon RT
Error: Contact form not found.
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if pointcloud is coloured)
UK payment plan
UK payment plan info
USA Payment Plan
Coupling with hardware
Some SLAM software algorithms have been made available as open-source on the internet, but they are purely algorithms and not a product that you can take and use off-the-shelf. SLAM is most successful when it is tightly coupled and designed with specific hardware in mind. A generic SLAM cannot perform as well as one that has been specifically designed for a purpose.
Usage in multi-environments
Visual SLAM is closer to the way humans navigate the world, which is why it’s popular with robotic navigation. But in the same vein, vSLAM will have the same image-capture challenges as humans do, for example not being able to look into direct sunlight, or not having enough contrast between the objects picked up in the image. These can be overcome indoors, however, you may need to map a forest, tunnel or urban canyon. While SLAM technologies don’t rely on remote data (meaning you can scan areas where there is no GPS), you do need to ensure the SLAM technology you chose operate well inside, outside, in daylight and darkness.
Real-time data capture
Mapping a property is time-critical. Ideally, you want to make a single visit and gather sufficient data to create a highly accurate 3D model. Ensure the software you choose transforms 3D point cloud data into actionable information in real-time. This allows you to view and interrogate your data whilst still in the field, and make any adjustments, or collect missed data, then and there.
Flexibility and deployment
If you’re trying to map an enclosed environment (e.g. tunnel, mine) or a complex, difficult-to-access space such as a heritage building with tight stairwells and uneven floors, you need to use fully-mobile, adaptable technology. Wheel-based systems, often used with the vSLAM camera, will struggle with access. Handheld devices or LiDAR scanners that can be attached to a drone or pole and still deliver accurate results in a rugged environment are best for navigating hazardous spaces.
Speed and accuracy
While vSLAM is able to provide a qualitative high-level map and sense of the surrounding features, if you’re needing survey-quality accuracy and rich-feature tracking at a local level, you’ll need to consider LiDAR. Cameras require a high-frame-rate and high processing to reconcile data sources and a potential error in visual SLAM is reprojection error, which is the difference between the perceived location of each setpoint
and the actual setpoint.
Quality and distortion
In order to deliver the depth required for high-quality data, a number of depth-sensing cameras are needed with a strong field of view. In most cases, this isn’t possible, especially as cameras with high processing capabilities typically require larger batteries which weigh down airborne scanners, or limit the time of flight. LiDAR is both faster and more accurate than vSLAM, and can deliver detailed point clouds without expensive (and timely) camera processing.