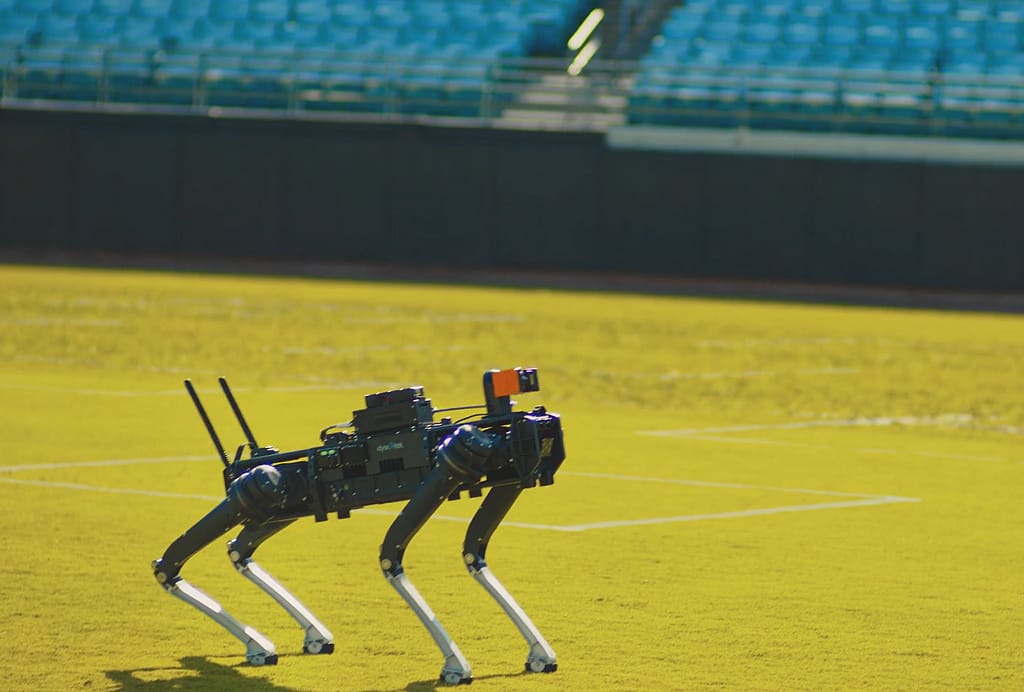
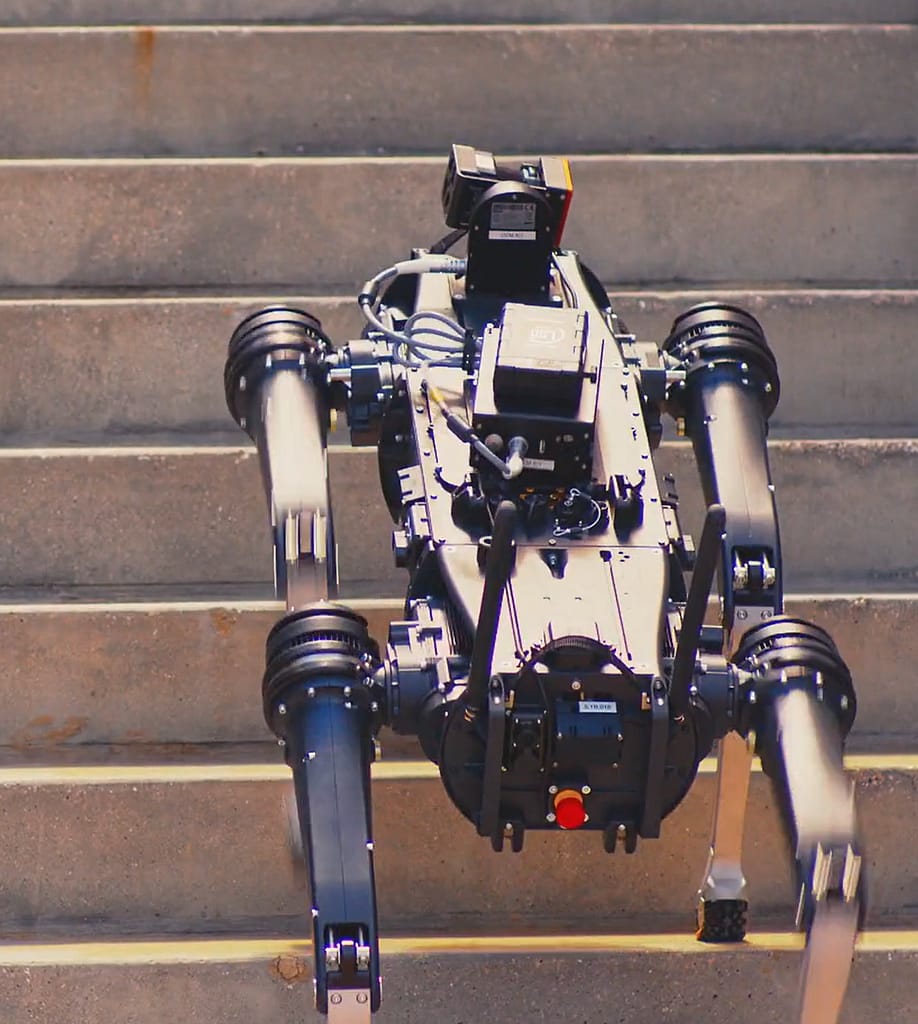
Robotic navigation using the strongest SLAM



How does Remote Access work?
The Remote Access API consists of a series of specific python scripts and dependencies which communicate with the ROS (robot operating system) software on the ZEB Revo RT.
The main scanner functions can then be controlled remotely;
The Scanner
Meet the ZEB Revo RT.
Hover over the icons below to learn more about the scanner.
43,000 points per second
Total payload weight 3.2kg
Relative accuracy of 6mm
Handheld or robot













