GeoSLAM Connect
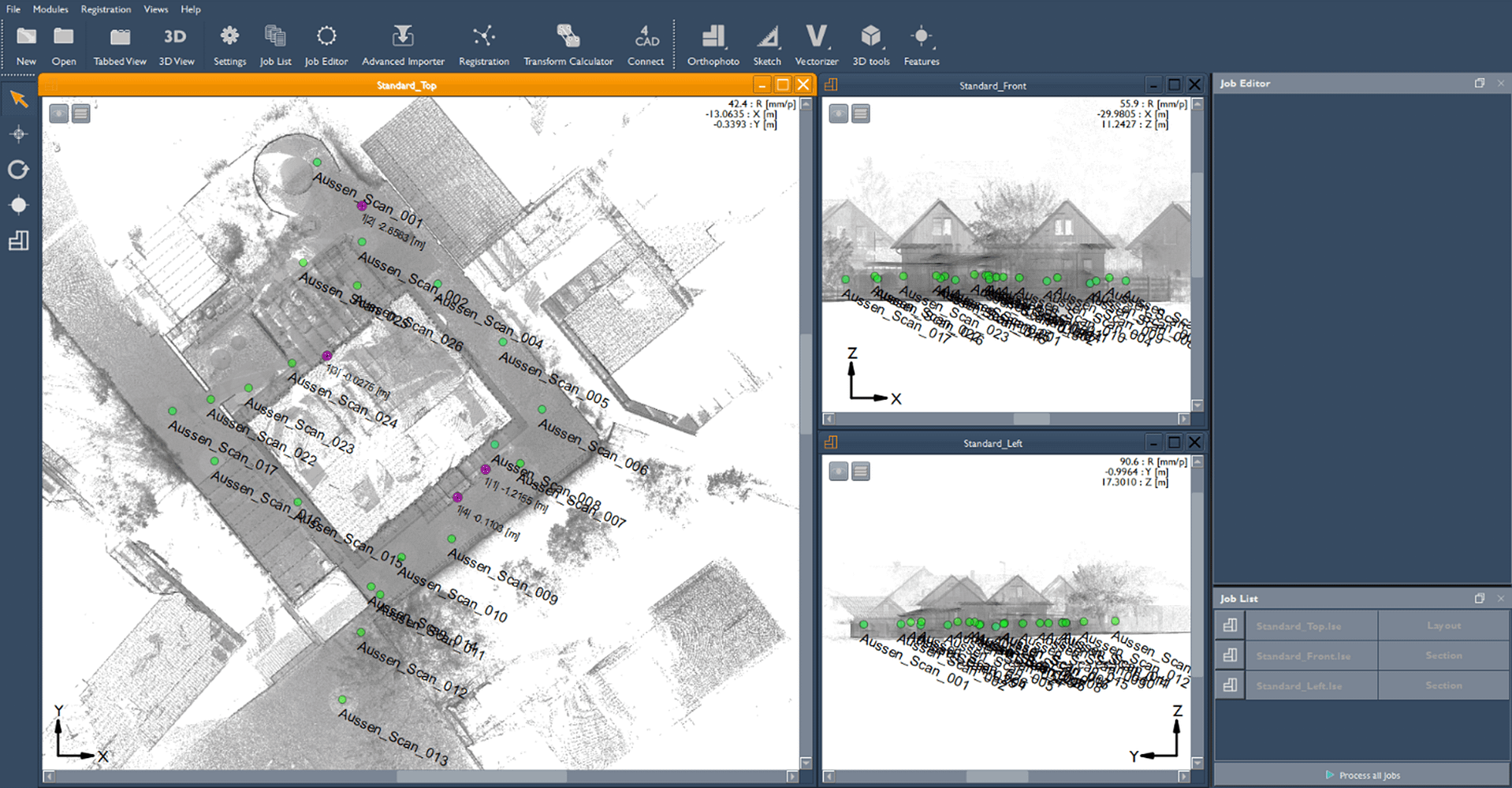
Create clean, georeferenced point clouds automatically with GeoSLAM Connect
Powered by the world’s leading SLAM algorithm alongside 3D visualisation of your data, additional processing and filtering, workflow automation tools and integration into third party software applications.
In 2022 GeoSLAM was acquired by FARO Technologies.
GeoSLAM Connect has been updated and renamed FARO Connect. To find out more about the features and benefits of FARO Connect, click the button below. FARO Connect is provided as standard with all ZEB family scanners, as well as with the FARO Orbis.
Take your data further
Get more from your point cloud data by taking it into GeoSLAM Draw or third party software.
GeoSLAM Draw
GeoSLAM Draw is an optional add-on software and comes in configured industry packages. Create projects directly from GeoSLAM Connect, elevate your point clouds in a few clicks and share them easily with colleagues and clients for detailed collaborations.
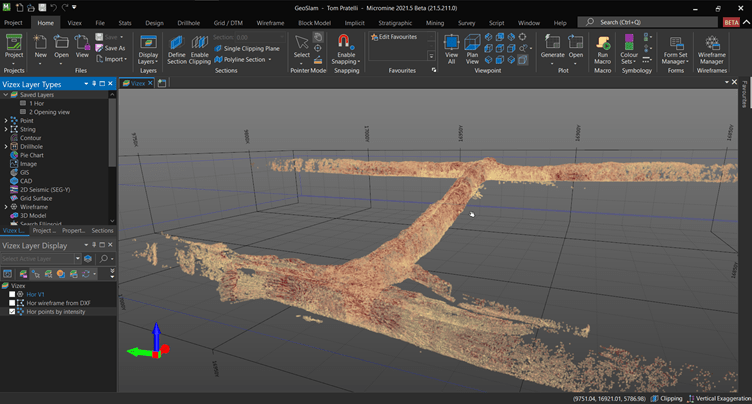
Third Party Integrations
GeoSLAM is built for flexibility. Whether you need to create 3D models or use the data for mine planning, take your point cloud to new places with many different third party software’s, including but not limited to, Revit, Micromine, Floorplanner, ESRI and Terrasolid.
Meet the ZEB family of LiDAR scanners
FARO Connect comes as standard with every ZEB purchase.
Our mobile LiDAR scanners make it simple to scan – whether it’s outdoor to indoor or outdoor to underground.

ZEB Go
ZEB Revo RT

ZEB Horizon














