Congratulations, you are moments away from using Connect
Follow the 3 steps below:

Step 1: Download GeoSLAM Connect
You can download the software using the link below. Your license information should be contained in your demo confirmation email.
Step 2: Download sample data
We have a range of different data sets ready for you to use during your demo, all captured with a GeoSLAM ZEB family scanner.
Step 3: Follow our step-by-step instructions
This page contains a range of useful documents, information on workflows and videos to step you through how to use GeoSLAM Connect.

If you requested GeoSLAM Draw when submitting the Connect trial form you can download it below.
Please note: If you are already using Hub or Draw :
Connect comes with GeoSLAM Draw 4.0. GeoSLAM Hub is installed with Draw 3.5, so if you want to install Connect on a machine that already has Hub installed, there are a few things you need to know before installing Connect:
- Before installing Connect, you should uninstall any existing Connect and Draw software.
- You will need to refresh your Draw license using the new GeoSLAM License Manager to update it to the new 4.0 version.
- Once you have installed Connect, Hub will recognise the new Draw 4.0 version.
- Projects created or opened in Draw 4.0 are not compatible with Draw 3.5.
- If you wish to revert back to Draw 3.5 you will need to uninstall Draw 4.0 and then reinstall Draw 3.5.
Getting Started
Installation
GeoSLAM Connect is a Windows based application and is therefore not supported for Mac or Linux. The operation system requirements are:
Minimum
- Windows 10
- i7 6th Generation
- AMD Ryzen 7 (1700X)
- Integrated Graphics
- 16GB RAM
- 30GB free space
- SSD
Recommended
- Windows 10
- i7 , i9 8th generation or greater (higher clock speed)
- AMD Ryzen 7 (2700X)
- NVIDIA GTX 1060
- 32GB RAM
- 30GB free space
- SSD
To install GeoSLAM Connect:
- Begin the installation as you would with most Windows applications.
- During the installation process, GeoSLAM Connect Control Centre, GeoSLAM Licence Manager and GeoSLAM Connect Viewer will be installed.
- Shortcuts for GeoSLAM Connect Viewer, GeoSLAM Licence Manager and GeoSLAM Connect Control Centre can be created on the desktop.
Logging in to GeoSLAM Connect:
- When you open the GeoSLAM Connect Viewer, you will be asked for a username and password (this will have been provided to you upon approval of your GeoSLAM Connect trial licence).
- Input your username and password and click Log in.
- A window will appear asking you to allow access using the login details provided. Click Allow and you will be taken to the GeoSLAM Connect Viewer.
*To begin processing any data, you will need to activate your GeoSLAM Connect software licence.
Licence Activation
GeoSLAM Connect licences can be activated using the provided GeoSLAM Licence Manager tool. This allows for online and offline activation of the software, and online/offline deactivation.
An Activation ID will be provided upon approval of your GeoSLAM Connect trial request.
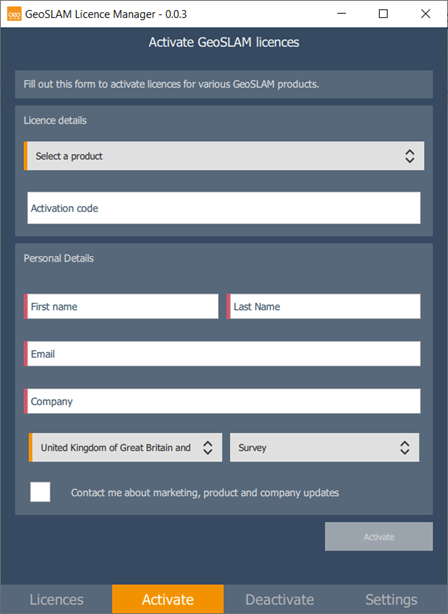
- Open the GeoSLAM Licence Manager tool
- In the ‘Activate’ tab, select the software your licence is related to from the drop down menu (GeoSLAM Connect) and paste your Activation ID into the required field
- Input your personal details into the appropriate fields – these are essential for a successful activation of your licence
- Click Activate
- Under the ‘Licences’ tab, a list of the installed licences will appear. The details of your installed licences (e.g. licence type, activation code, expiry date) will be visible in this tab. If your GeoSLAM Connect licence is showing as “active”, this shows that you have successfully activated your licence for this software
Creating a Project
To process data, use automatic workflows and visualise outputs, you will need to use GeoSLAM Connect Viewer.
Creating a New Project
- Open the GeoSLAM Connect Viewer
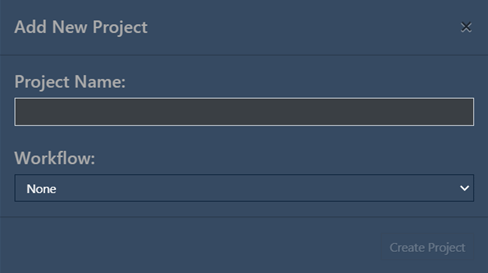
- Select the ‘Add New Project’ icon from the menu bar
- Type in a name for the project and select a pre-defined workflow from the drop down menu. These workflows are the geoscripts you have stored in C:\ProgramData\LidarOs\geoscripts
- Click Create Project
- You are now ready import start importing and processing datasets
Visualising Point Cloud Data
Once a workflow has completed, the LAZ file will appear in the results tab in the project tree. Double click on the LAZ file to open it in the viewer window.
When a LAZ file is loaded in the viewer, the data filtering toolbar becomes active and allows you to edit your point cloud (e.g. change the colour mode and cropping).
The LAZ file can be coloured by:
- Elevation
- Solid (single colour)
- Intensity (for ZEB Horizon data only)
- Time
Other file types can be shown in the Connect Viewer (e.g. trajectory, control points). These can be selected by double clicking the relevant file in the project tree. The data filtering options shown will vary depending on which file type is selected in the project tree.
The visibility of each file type can be switched on/off using the visibility button at the side of each file. The entire project can be closed using the Close Current Project button in the menu bar.
Workflow Library
Need help?
Need further assistance from our helpful support team? They can be contacted by phone or email below.
By phone
Monday – Friday
8am-8pm (UK time)
Weekends and Bank Holidays
10am-8pm (UK time)

By email
The support team are available by email.













