Last Updated on 25th April 2022
The modern industrialised world might be thought complacent of taking the reliable services that support daily life for granted – power, water, waste-disposal. More so if the beneficiaries of those services half guessed at what is involved in maintaining and operating the infrastructure that underpins them.
 “The demand for up to date, accurate 3D models of physical environments is greater than ever before”
“The demand for up to date, accurate 3D models of physical environments is greater than ever before”
The UK water industry alone has over 700,000 km of mains and sewers – compared with just 3764 km of motorways – and much of that water-carrying infrastructure is creakingly old, built in the Victorian era. For those who maintain and exploit these structures, understanding their status is a crucial first step toward planning how and when to intervene.
For power generation the problem is similarly daunting. In 2016, 150 nuclear reactors worldwide had been shut down but only 17 had been taken to fully ‘greenfield’ site status. The total cost to decommission the nuclear fission industry worldwide has been estimated to be around 1 trillion USD and the figure continues to climb.
Whether it is a nuclear power station, a pipe or a sewer, there is a problem common to all: access. How to get into these places, and even if you can, should you, as a human being, go there? The answer is generally no. In the case of the sewers and water pipes the distances are enormous, access is often restricted, surfaces are slippery and gases can be noxious. In the case of nuclear decommissioning the radiation levels make many environments totally no-go for humans. Some are so dangerous that even sensors have a short life.
If people can’t go… then robots are the obvious substitute. Modular, reconfigurable robots make that choice easier as they can be adapted for the task they have to perform. They can be reduced in size to operate in small spaces or be made larger with appropriate traction and payload-carrying ability to deploy a full range of sensors.
The demand for up to date, accurate 3D models of physical environments is greater than ever before and, where creating these models is traditionally done by professional surveyors, doing this in hostile or inaccessible environments is a real problem. In environments that are inaccessible, difficult to reach, or simply too hostile or extreme to safely deploy humans, a robotic solution is needed.
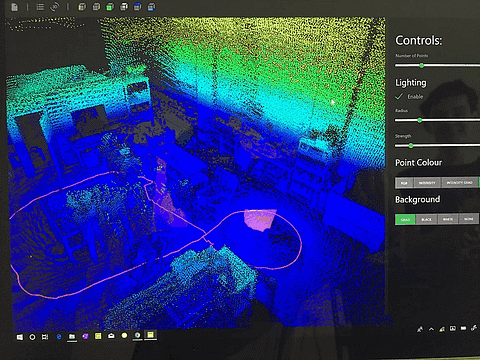
Data viewed inside GeoSLAM Hub
Ross Robotics has teamed up with GeoSLAM to provide an effective, robust and reliable solution that integrates the two companies’ proven technologies – Ross Robotics’s Extrm SC2.0 unmanned autonomous ground vehicle, and GeoSLAM’s ZEB-REVO 3D 360° geospatial scanner and its real-time and post-processing geospatial analysis software.
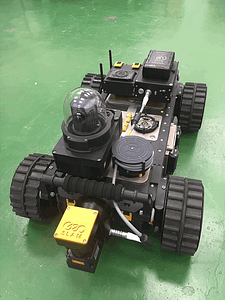
Ross Robotics’s Extrm SC2.0 unmanned autonomous ground vehicle
Today’s customers need access to user-friendly autonomous technology that is easy to install and use, but is robust and reliable enough to do the job quickly and accurately. For those working in difficult to access spaces where there is no GPS coverage such as inside buildings, in pressure vessels, in pipes and conduits, caves, mines and forests, the demands on the technology are even greater. And in more hostile environments mapping the space is not only time critical but highly dangerous if not fatal. They need tools that enable them to survey an indoor, underground or difficult to access space, safety and within minutes, and to build a highly accurate 3D model. Ross Robotics and GeoSLAM has the answer.
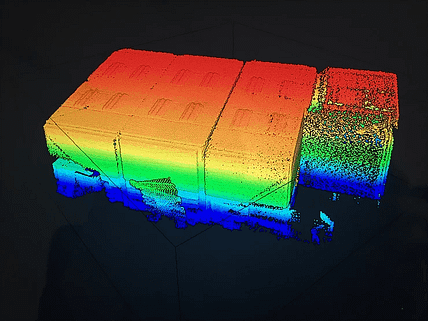
The combined platform can navigate around your target survey environment to record more than 40,000 measurement points/second. The software allows users to view data, merge, export multiple file formats, vectorise, and directly manipulate the resultant point cloud which can be used to create 2D layouts or 3D models in industry standard CAD and point cloud post-processing software.
“The GeoSLAM technology is second to none and it deploys well on our autonomous unmanned ground vehicles, we’re thrilled to be working with GeoSLAM and their technology in these demanding scenarios” says Philip Norman, founder and Director of R&D at Ross Robotics.
About Ross Robotics
Ross Robotics develops modular autonomous ground based robotic vehicles for use in inspection and maintenance operations in remote, hazardous, and inaccessible environments. The modular EXTRM SC2.0 platform allows third party tools and sensors to be easily and quickly integrated, to deliver a wide range of capabilities in a variety of missions.
Interested in working with GeoSLAM on your robotics or autonomous navigation projects? learn more about our partnering solutions here.













