Surveyors need to accurately capture, manage and utilise 3D spatial information – often in environments where there is very limited time on site. Omega Geomatics, a land surveying practice in the UK, took on one such task when they produced 2D floorplans for a nursing home, while the site was occupied 24/7. Paramount was ensuring minimum disruption to residents, while still achieving a high level of accuracy.
With the building measuring 663m2 and with 23 residential rooms, communal and staff areas, the project team needed to find a new surveying method that meant they could walk and scan each resident’s room quickly without disrupting their daily routines.
Two surveyors visited the nursing home and coordinated five spheres by the building exits on multiple levels. With GeoSLAM’s ZEB Revo, and its speed of capture capabilities, the team were able to walk around the building and capture the data needed from each room within just 10 to 20 seconds.
With just two team members required for the project and less time expended on site, the overall cost was dramatically reduced
The team conducted long-distance checks and height measurements. External scans took place, as an extra accuracy check. The entire scan took just 30 minutes, and the client was provided with accurate 2D floorplans within 24 hours, notably without any distress or disturbance to residents.
The project required just two team members and this rapid data collection had huge cost-saving benefits. In turn, this led to less time spent on site, which also contributed to reducing the cost, all without compromising on accuracy. The scan achieved an average +/-15mm which met the needs of the client.
Midland Surveyuses GeoSLAM to scan nearly 200 rooms at Oxford University
Industry
Surveying
Scan time
30 mins per scan
Location
Oxford, UK
Size
12,000 sq/m
Scanned
University
Words by David Johnson | Midland Survey
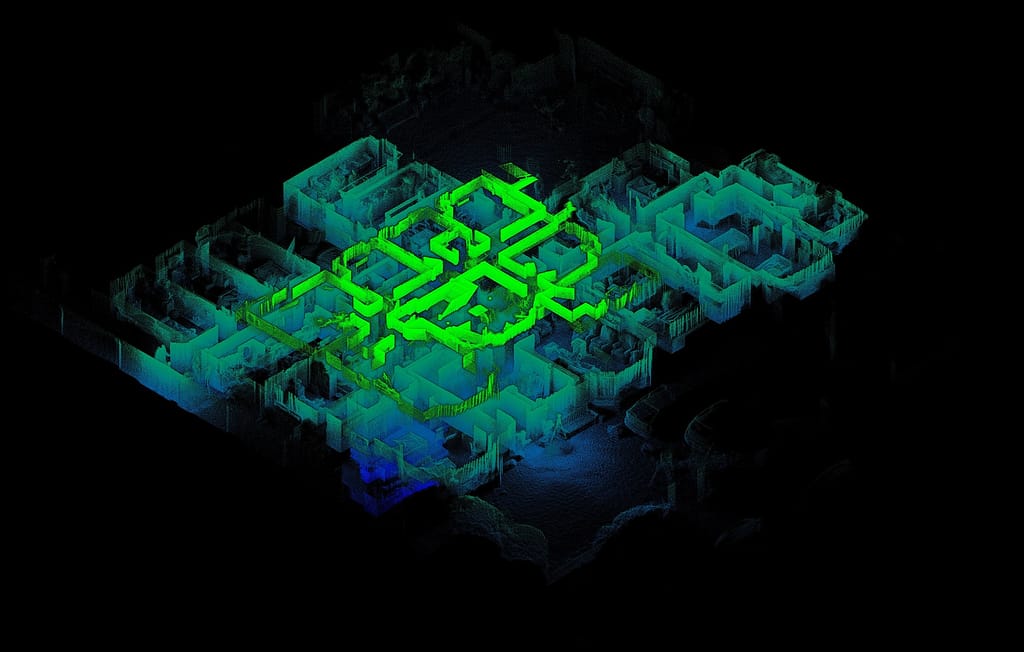
“Midland Survey are experts in surveying complex and difficult to access spaces where there is limited or no GPS, but Oriel College with its labyrinthine network of historic buildings brought a particular set of challenges.
Oriel College, part of the prestigious University of Oxford in the UK, is nearly 700 years old, with around 200 rooms across five stories including an “island site”, accessible only via tunnel. The structure has been extended over the years and no accurate floor plans or elevation drawings exist.
As a world-class institute, it is occupied 24/7 and opportunities to accurately scan with minimal disruption are few. Traditional tools were not an option due to the network of rooms spread across 5 stories.
Due to the lack of GPS coverage in the tunnel, the only option was to use GeoSLAM’s ‘go-anywhere’ ZEB Revo. The unusual shape of the building, with its unconventional layout and complex network of rooms, meant it was too difficult and time-consuming to survey with traditional static scanning methods (as this would require multiple individual set-ups and increased post-processing work). We needed a lightweight, mobile tool that works well in enclosed environments.
“The entire project was completed in around half of the total time that would have been required using static equipment. The ZEB Revo is a real game-changer for us.“
Using the ZEB Revo around 200 rooms were scanned, amounting to 12,000m². Across 5 days, 12 individual rapid ZEB Revo scans were completed each taking just 30 minutes. The entire project was completed in around half of the total time that would have been required using static equipment.
We frequently work in hazardous environments, as well as in complex and difficult to access spaces where there is limited or no GPS coverage such as heritage buildings with thick stone walls. We often have limited time on site to accurately create a 3D model. Access to user-friendly technology such as the ZEB Revo that scans multi-level environments and produces accurate and high-quality 3D survey data, is a real game-changer for us.
Minnesota Manholes– Scanning Safely and Quickly in Confined, Hazardous Spaces
Industry
Civil Engineering
Location
Minnesota, USA
Size
4,500 manholes
Scanned
Sewer pipe network
Public works and energy utilities are continually looking for new ways to protect the safety of their personnel in the field. With the help of the GeoSLAM ZEB Revo mobile laser scanner and the specially designed GeoSLAM Cradle, the cramped and hazardous spaces in manholes can now be captured in 3D without putting field workers at risk.
“An engineering survey firm scanned the interiors of 4,500 manholes with the ZEB Revo for a Minnesota municipality,”
What lies beneath the manhole covers found in nearly every city and town varies considerably. Some are access points to extensive storm water and sewer pipe networks. Others are entries into utility conduits through which water mains and electric lines are run. A few manholes are simply tight underground spaces where key pieces of municipal infrastructure reside.
Regardless of their function, manholes and the assets they contain are difficult and sometimes hazardous to map. Not only are the interior spaces dark, dirty, confined and usually wet, they pose potential risks related to cave-ins, poor ventilation and rodent infestations. Above ground, the manhole access points are often in the middle of busy streets requiring set-up of a cone zone to try and protect workers from passing traffic.
“You capture the data you need for one job and then have information someone else might need for another without a second site visit.“
This combination of hazards compels workers to spend as little time inside the manhole as possible. As a result, they have traditionally captured only the measurements they need for the project at hand – usually with a surveying level rod.
You capture the data you need for one job and then have information someone else might need for another without a second site visit. One of the most common applications is measuring the elevations of pipe inverts to map a water supply or drainage network in preparation for system expansion or maintenance. Personal hazards aside, making accurate asset measurements in a tight underground space with a long level rod can be challenging.
The ZEB Revo is increasingly being turned to for these jobs because the handheld laser scanner is fast, accurate, and captures comprehensive point clouds. Most importantly, it keeps personnel out of harm’s way. Favoured for manhole environments because of its high IP rating, which means it can be used in dirty and wet conditions, the ZEB Revo can be lowered into the underground space with the GeoSLAM Cradle.
manhole cover replacement, sewer system repair, sewerage; roadworks, traffic cones
In just a few minutes, the lightweight device can capture 360-degree scans inside the space regardless of available lighting. Even if the assets being surveyed are offset from the opening or several meters down tunnels, the ZEB Revo captures the 3D scan data needed to generate an accurate point cloud of the subsurface space.
“The first benefit of laser scanning [in manholes] is safety. The second is you collect a very comprehensive and complete data set. You capture the data you need for one job and then have information someone else [in the organization] might need for another…without a second site visit.
The Importance of Accurate Measurements in Construction
In Denmark, inaccurate data of floor space in residential or office buildings can have legal implications. Therefore, building contractors must provide accurate measurements for the built floor area for each apartment before a purchase could be finalised.
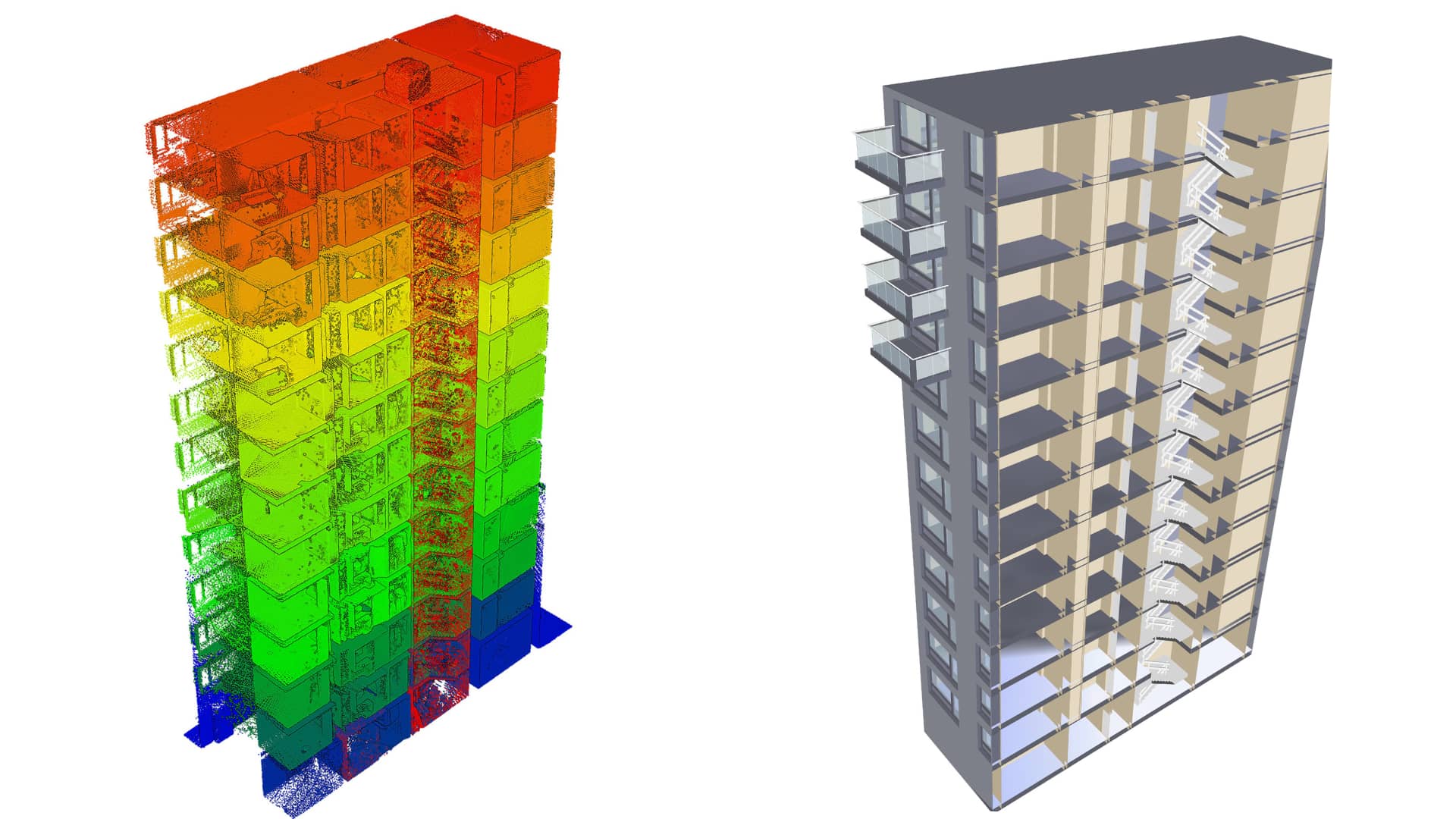
LIFA Surveyors is one of the leading surveying companies in Denmark. They were recently tasked with collecting floorplan data for a 13-story waterfront apartment building in Vejle. The apartment building, totalling 58,000 sq. ft, was going through construction, and each apartment required accurate measurements of the floor space.
Consequently, LIFA Surveyors needed a solution that could precisely map each apartment at speed and with minimal disruption.
How GeoSLAM Technology is Beneficial for Surveyors
They decided to work with handheld SLAM laser scanners and found that GeoSLAM’s ZEB Revo was the best solution for the job.
The ZEB Revo appealed to LIFA for various reasons but above all the scanner is easy to use, requiring minimal training. As a result, the entire building could be scanned by one person in 30 minutes. Further, the ZEB Revo’s speed of capture combined with its accurate measurements, meant that LIFA could achieve its goals cost-effectively.
We surveyed an entire 13-storey residential building in one and a half hours with only 30 minutes needed for the actual scanning.
Using accurate measurements and point clouds to Create BIM Models
The 3D point cloud data collected by the ZEB Revo was used to create a Building Information Model (BIM). Technicians used the BIM to take measurements of the apartments and common spaces, such as hallways and elevator shafts. During this process, the team visually compared the model against the original design plan to ensure that all building elements were constructed correctly. Due to the efficiency of the scanner, LIFA achieved the accuracy needed for their client.
The speed of capture and ease of use resulted in LIFA surveyors dramatically reducing their time on interior building survey from days to hours, whilst maintaining high levels of accuracy.
Within days of the scan, LIFA delivered the final measurements to the contractor – a cost-effective solution for both companies.
Iowa Department of Transport uses SLAM to create 3D models of salt stockpiles
Industry
Mining
Scan time
10 mins per scan
Location
Iowa, USA
Size
109 stockpiles
Scanned
Salt stockpiles
Words by Tina Greensfield | Iowa DOT
At Iowa State DOT (Department of Transport) it is our job to make sure over 24,000 miles of road remains clear and safe to use in winter. We have 109 maintenance areas across the state where stockpiles of salt are kept for distribution. Each facility can each hold up to 1200 tonnes.
Throughout winter salt is loaded onto trucks and spread on roads to stop the surface from freezing. Pay loads are measured in weight as salt is loaded onto spreading trucks and supplies are depleted. But as the salt is used, there is a clear discrepancy between the volume of salt in the shed and the paper records – it is not reliable to just look inside a half-empty shed and assess how much material remains.
If volume of salt is too low or we don’t know how much is available, we may find ourselves forced to make snap decisions about redistribution which is both costly to the state and inconvenient to residents and businesses alike.
We needed another solution and following a few severe winters where salt reserves around the country ran out, the Great Lakes froze and shipments were halted we were determined to invest in a reliable measuring process for managing stockpiles in future, which led us to a GeoSLAM volumes solution.
“In terms of speed and accuracy, this was a real game changer for us!“
Using the handheld SLAM device, we can produce a three-dimensional model of the stockpile in just a few minutes. We have never experienced this level of accuracy before and capturing data was as easy as surveying the site with the naked eye.
The surface of the stockpile is very uneven with lumps on one side and big cliffs on the other where loaders have dug-out salt for spreading, in the past our ‘best guess’ used to involve looking at the stockpile against some markers on the walls of the shed which provided limited accuracy to say the least, so this was a real game changer for us.
Data is then processed using GeoSLAM Hub and imported to the volumes software. As the granules vary in size, we apply a bulk density value as well as defining a floor and perimeter of each pile calculate the total volume of the stockpile in tonnes.
From start to end, the entire process took around twenty minutes. We now have depot staff going out and scanning the stockpiles regularly. This new level of insight means we don’t have to worry about compromising road users’ safety across the state of Iowa as we always know what volume of salt we have available to use.
Glencore uses GeoSLAM to assess risk in underground base metal mine
Industry
Mining
Scan time
15 mins per scan
Location
Savannah, Georgia
Scanned
Base metal mine
Kidd Mine, Glencore | Natural resource company
When creating underground mapping for mines, mining engineers are often faced with having to work in hazardous and rugged environments, in difficult-to-access spaces and without GPS coverage. In order to address these challenges, mining companies are continuously searching for ways to plan efficient site operations, streamline tunnelling processes and optimise production and personnel safety.
Kidd Mine, an underground base metal mine in Canada and the world’s deepest copper/ zinc mine, epitomises this by adopting new and advanced survey technology. With the aid of GeoSLAM’s 3D mapping technology, the mine is able to assess risk associated with ground and support systems failure, magnitude seismic events, large-scale deformation or rock bursts associated with mining at extreme depths.
Built for harsh and demanding environments, GeoSLAM’s handheld laser scanners are robust, splash-proof and dust-tight (with ratings up to IP64 level). They’re adaptable to any environment – inside or outside, in daylight and darkness – without the need for GPS.
Lightweight and easy-to-use, you can walk and survey accessible areas quickly and easily – even those which are normally off-limits. For more confined or unreachable places, they can be attached to trolleys or mine vehicles for remote monitoring.
“It’s critical data that will help us lower the risk to personnel and keep mines safer“
David Counter, a senior ground control engineer at the Kidd Mine, emphasised the importance of using a hand-held laser scanning device to map the underground areas at the mine. “It produces a continuous 3D animation image of whatever underground areas are being scanned as the user walks along the drift. This allows the mine to map out problem areas and to carry out ground support rehabilitation in those areas.”
“The ZEB Revo provides a background dataset that can be used for comparative purposes if a future high-magnitude seismic event occurs or for determining how much static deformation has been occurring due to regional mine closure over time.”
Despite needing to rapidly map mines under intense time constraints, traditional underground survey techniques have proved to be slow. Mine engineers and surveyors all need access to user friendly technology that is easy to install and use, but is robust and reliable enough to do the job quickly and accurately. Within minutes anyone can be using a GeoSLAM scanner and immediately start creating a 3D point cloud of the area. Data is collected continuously while walking the survey area – with no time-consuming or cumbersome set-up required.
GeoSLAM’s award-winning software instantly turns data into actionable 3D information. So, you can rapidly gain insight into rock mass behaviour and map out deformations in rock walls & complex tunnel profiles. Plus, accelerated survey workflows help you deliver productivity and efficiency improvements, at the same time as helping you hit your zero-harm targets.
“There is a sound basis for SLAM laser technology to define areas where the ground support systems need to be replaced or rehabilitated,” Counter concluded.
As mobile laser scanning becomes faster, more cost effective and accurate, surveying companies are finding them to be one of the most efficient tools for capturing the spatial details of a building in 3D. Pointclouds are being used more and more in the property renovation and architecture markets, where the use of LiDAR and SLAM are driving down cost and increasing efficiency.
CEP David Pierrot is a surveying company based in the South-East of France, in both Cannes and Mandelieu. Since beginning their business in 1965, his company has worked on over 21,000 projects in the Alpes-Maritime and surrounding areas, and they continue to work on over 800 projects per year.
The company is represented by 2 expert surveyors, David Pierrot and Robin Bruna. They understand the value in using the latest hardware and software technologies to achieve the best results for their clients. In recent years David and Robin have adopted GeoSLAM scanners into their arsenal of tools, due to their speed and precision. They began working with the ZEB Revo RT, and have since incorporated two ZEB Horizons into their business.
Pointcloud captured by CEP David Pierrot using GeoSLAM scanners
ZEB Horizon | Scanning a French villa
The company was recently tasked with completing a survey of a villa on a steep hillside, in Théoule-Sur-Mer. The goal of the project was to create a detailed topographical map of the existing building and surrounding area, working closely with an architect who will use the map to plan and conduct new construction work. As the surveying experts, they establish whether the site is suitable for the planned construction work, and the architect uses the 3D/2D vector to put together plans for the construction work.
The GeoSLAM ZEB Horizon was chosen to conduct this scan because of its speed of acquisition, precise measurements, range, and versatility. A large part of the scan took place on a steep hill leading up to the house, so a handheld scanner was the ideal choice.
The surveyor in charge of this scan, Robin Bruna, was able to walk and scan, cutting down the time it took to capture the entire area, whereas a static scanner on a tripod would have taken far longer due to the tough terrain. The entire scan was conducted using only the GeoSLAM ZEB Horizon.
The ZEB Horizon scans points at 40-50m, which allows for a much better trajectory than other mobile scanners.
The area of land scanned, including the house, totalled 8000 sq/m and the whole area was captured in just 4 scans. Each scan took approximately 10-15 minutes to complete, so the team were able to capture useable pointcloud data in approximately one hour!
The separate scans were then processed using GeoSLAM software and merged into a complete 3D pointcloud before being georeferenced. The team then took the pointcloud through a classification process to get a better understanding of the land, before beginning the creation a 3D/2D vector map in Autocad.
They also created longitudinal cuts in the cloud to provide the architect with reliable and visual information about the incline of the hill. The maps created will help the architects carry out landscape insertions and plan out new construction work to the lower part of the property.
The use of the ZEB Horizon meant that the team could not only carry out the entire scan with ease, but due to the speed of data acquisition, they were able to get the pointcloud into the post processing stage far quicker than if they had used a static scanner, thus saving them time and money.
The digitlisation of the land makes it possible for the architect to check the feasibility of construction, without needing to re-visit the area. Finally, in line with the “ordre das geomitics-experts”, David and Robin set up a process that allows the inspection of the measurement accuracy.
To learn more about some of the projects CEP David Pierrot have been involved with, visit them at www.cabinetpierrot.fr
Creating floorplans to cut incident response times
Industry
Security
Time
Response time reduced by 21%
Location
California, USA
Size
98,200 institutions
Scanned
Schools across the USA
Entropy Group | Words Robert W. Myers J.D.
Active shooter incidents are a growing concern in the United States, with death tolls, most predominantly in schools, rapidly rising and law enforcement resources stretched beyond breaking point.
With the unpredictability of these incidents, both in scale and location, our team at Entropy Group LLC has been working alongside law enforcement and US attorneys nationwide in order to compress response times, by utilizing 2D floor plans and 3D models developed from GeoSLAM ZEB Revo RT data sets, a program that is patent pending.
“ZEB Revo RT provides us with the necessary accuracy and is much more time efficient than other laser scanning technologies.“
The significance of the problem is evidenced by the recent publication of a National Standard for response to active shooters. The National Fire Protection Association, (NFPA), published NFPA 3000(PS), a provisional national standard, titled, “Standard for an Active Shooter / Hostile Event Response (ASHER) Program“, published April 11, 2018.
According to scanning professionals, to map just the K-12 public schools in the U.S., it would take a scanning team, scanning 100,000 square feet per day, seven days a week, a total of 181 years to complete. This estimate addresses only the public schools and does not address any of the many private schools, let alone the post-secondary school facilities.
When confronted with the magnitude of the effort it was immediately obvious to Entropy Group LLC staff that we needed to join forces with GeoSLAM because their ZEB REVO line of scanners provide the necessary accuracy and are much more time efficient than other laser scanner technologies.
To finalize the proof of efficacy of the patent pending filing, Entropy Group LLC recently completed a simulated active shooter incident where six law enforcement officers were tested by responding to a fictitious scenario. Officers were provided a detailed floorplan of the two story building which is currently used as a church and parochial school facility. The structure is quite complex with many classrooms, counselling rooms, worship sanctuary, multi-media studios, café area and church offices.
The results of the exercise indicate that officers which have access to the 2D floor plans ahead of time, improve their situational awareness, their confidence in responding to a facility that they have never been to previously, by gaining “facility familiarity” through review of floor plans and other data prior to their response. Additionally, response times were documented to decrease by up to 21%. This improvement in response will directly result in fewer deaths and casualties.
Entropy Group LLC is a full-service Forensics and Security Consultancy firm providing services for Executive Protection, Accident Reconstruction, Security Threat Assessments, Building Information Modelling, Security Design Reviews, Security Program Reviews / Audits,Litigation Support, Pre-Travel Security Front Team Assessments, and Access Control Assessments.
We value our relationship with GeoSLAM and California Surveying and Drafting Supply (CSDS) and their support of our mission by providing premier instrumentation for the improvement of societal ability to address and respond to active shooter events.”
1 Springer. “Rapid rise in mass school shootings in the United States, study shows: Researchers call for action to address worrying increase in number of mass school shootings in past two decades.” ScienceDaily, 19 April 2018
Using LiDAR to understand complex forest environments
Industry
Conservation
Scan time
10 mins per scan
Location
Cornwall, UK
Size
1km in length
Scanned
Eden Project
University of Leicester | Eden Project
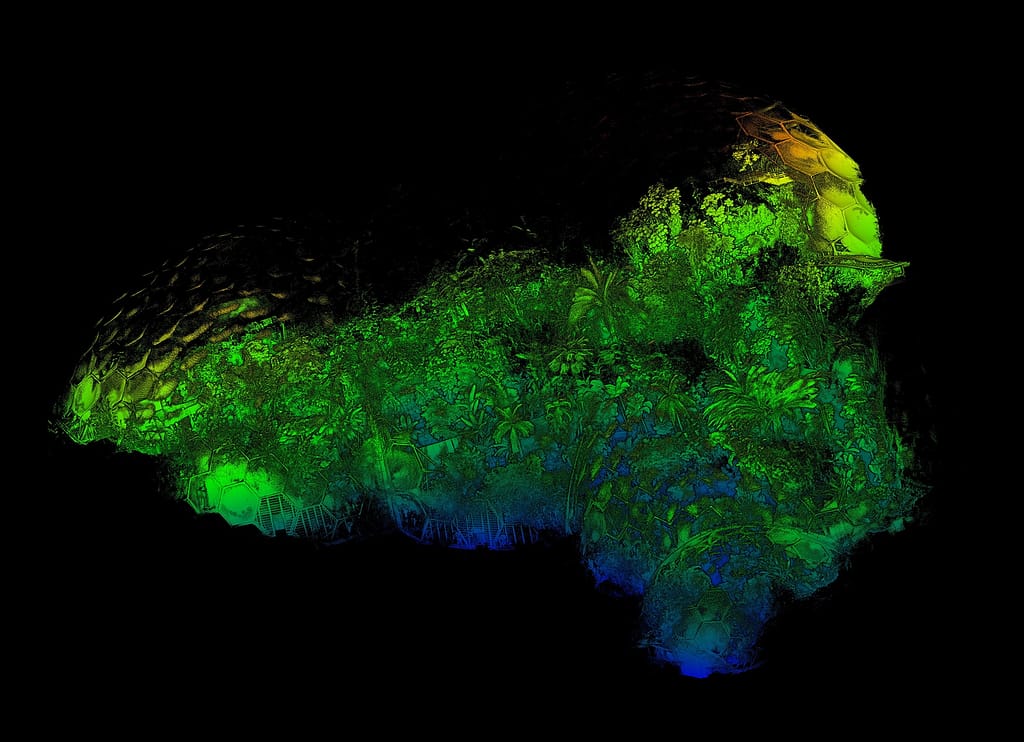
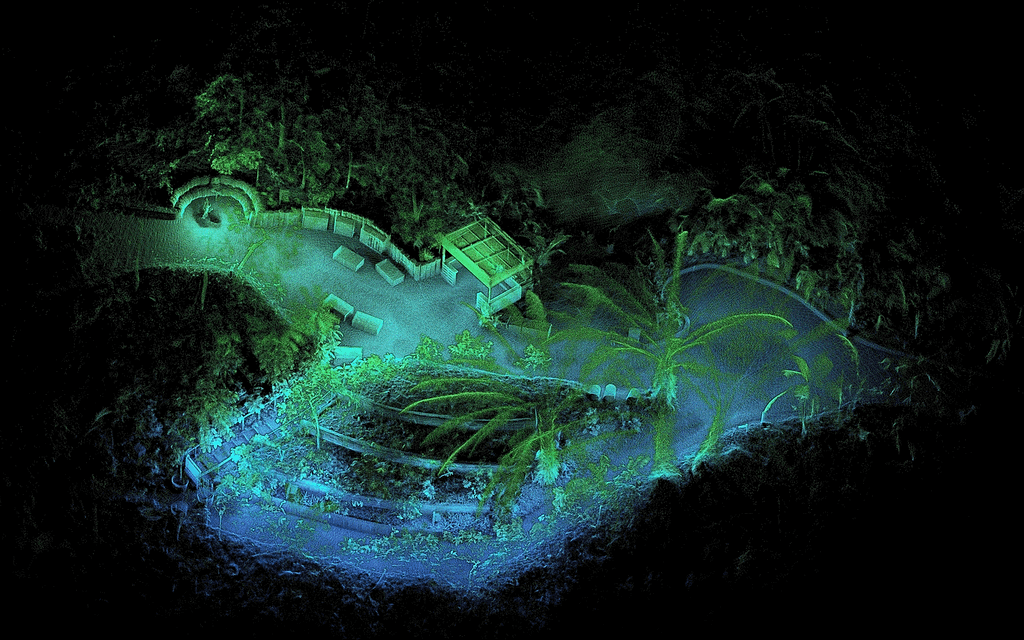
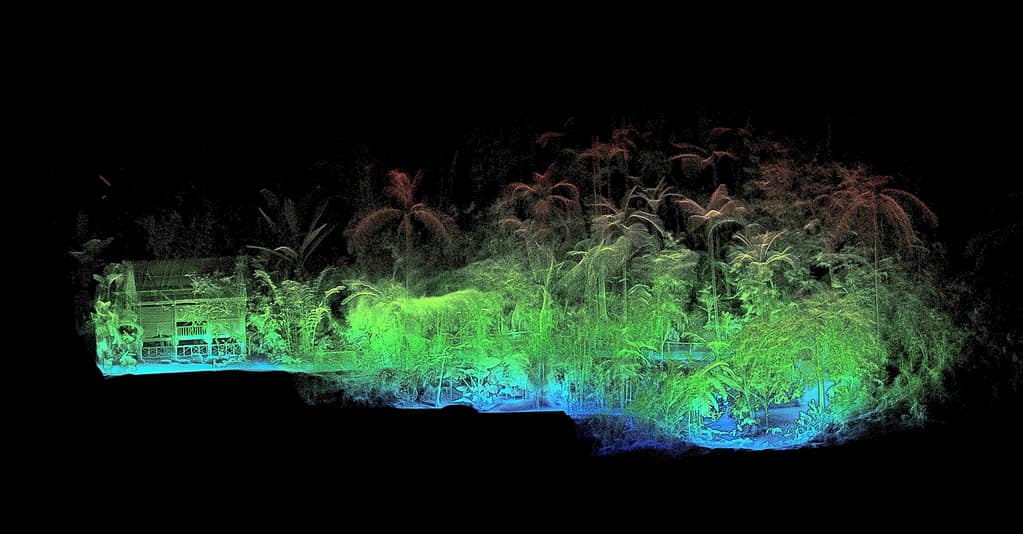
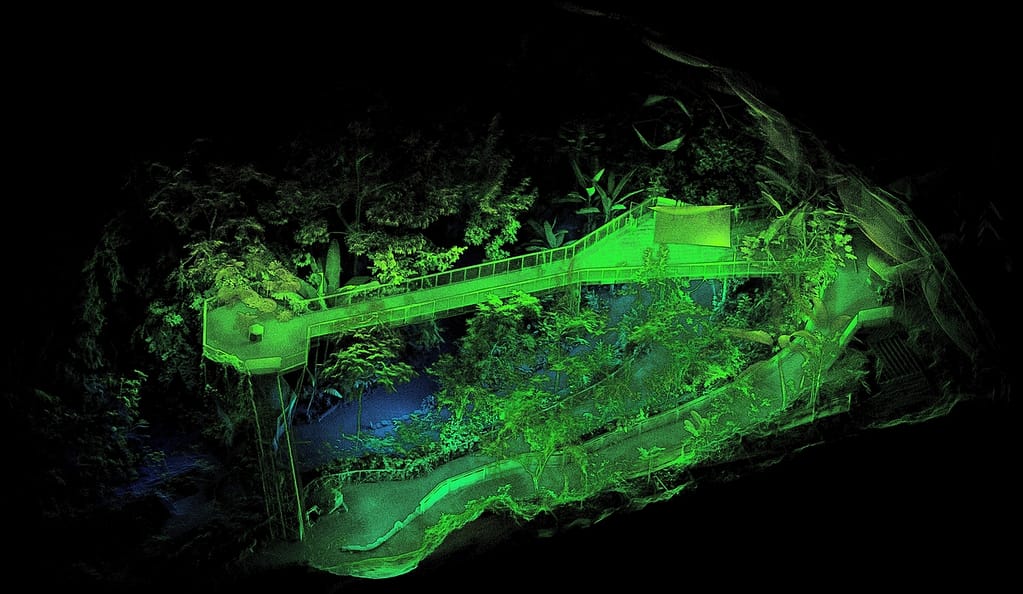
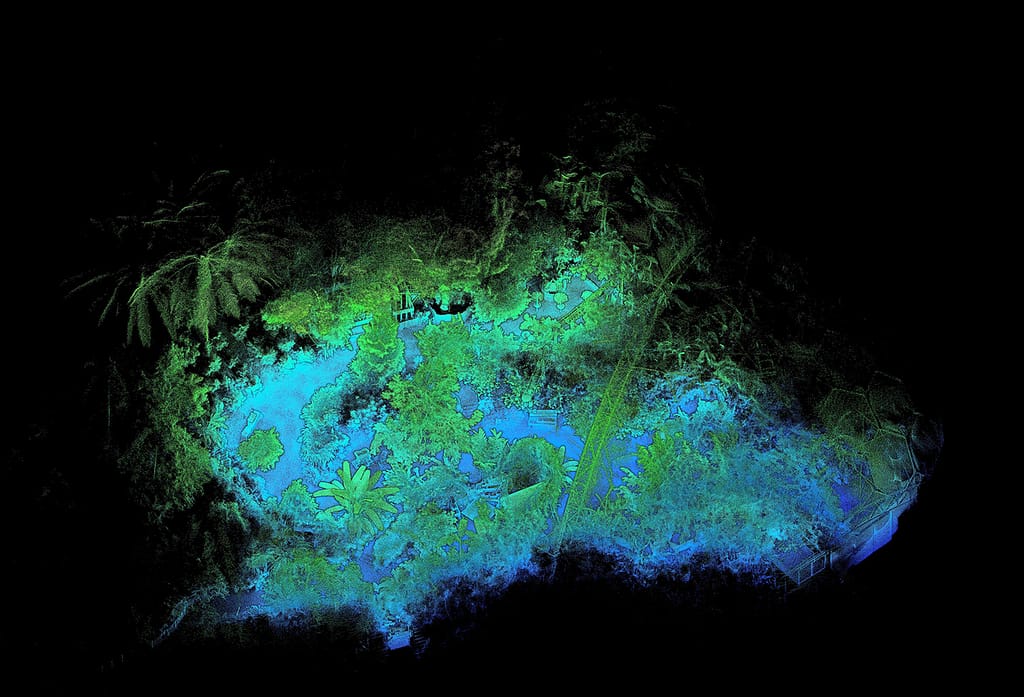
Monitoring and understanding our environment has never been more important as the threat of climate change looms and governments step up to better manage their greenhouse gas emissions. Tom Potter, a doctoral researcher at the University of Leicester, UK, set out to further develop a technique to estimate biomass and carbon more efficiently using state-of-the-art, mobile LiDAR sensors across multiple, complex forest environments.
To do so he visited the Eden Project in Cornwall, UK which reflects a true tropical forest – representing different forests from around the world with a rainforest ‘biome’ of over 1,000 tropical trees and plans. However, he had to work around several challenges. For fixed point scanners, the high-density plots of specimens created a problem of shadows – known as ‘occlusions’ – whereby the nearest features will block out features behind. This also limits the ability to acquire accurate measurements to create a comprehensive 3D model. And with the biome being open to the public and a popular tourist destination, Tom only had a few hours each day before opening hours – insufficient time for a traditional static survey.
“Using GeoSLAM’s local processing software, the raw scan data was processed on site, with no internet connection required – useful when in an actual rainforest!“
Mobile surveying equipment that was able to take readings easily and quickly from even the densest areas was needed to ensure precise scans were taken to accurately calculate biomass and carbon storage potential.
Tom found the mobility and speed of GeoSLAM’s ZEB Revo to be the perfect solution. The lightweight scanner can be pole mounted, handheld or even attached to a vehicle or drone – collecting over 43,000 measurement points per second. Instead of hundreds of time-consuming static scans, Tom captured all angles by simply walking in a loop around the rainforest environment.
He then converted the point cloud data into 3D volume-based plots to derive above-ground biomass and carbon densities for multiple types of tropical forest. A comprehensive dataset was built, containing information for any type of forest that scientists can use to make calculations with minimal survey effort or expertise. And all at considerably less expenditure than traditional survey methods.
Choate Construction utilizes GeoSLAM to create floorplans for hurricane damaged properties
Industry
Construction
Scan time
7 mins per scan
Location
Savannah, Georgia
Size
111,000 sq ft
Scanned
Apartment buildings
Choate Construction | Construction company
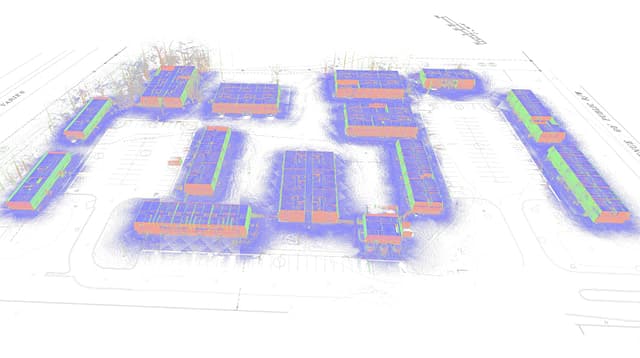
2017’s Hurricane Irma was the most powerful storm to hit the continental United States since Katrina in 2005. Besides the high human cost (almost 100 lives lost in the US) the financial cost to property was estimated to top $50 billion – the 5th costliest hurricane in US history.
Amongst those damaged properties were the Westlake Apartments in Savannah, Georgia – a complex of 14 buildings containing 100 individual apartments encompassing over 111,000 sq. ft. These residential structures were flooded by the storm surge – meaning major renovations were required to repair the significant water damage.
The Westlake Apartment complex consists of 14 buildings and over 1,000 rooms
With the complex dating from 1974, no building blueprints were in existence. The huge task facing contractor Choate Construction was therefore to rapidly collect this spatial data to produce the necessary internal floorplans and external elevations. Utilizing a static scanner was out of the question as to capture all necessary data would have required over 1,500 individual set-ups – at an estimated timescale of 3 weeks.
“This would have taken over 75 hours of scanner time along with a static scanner, with the ZEB Revo we were able to accomplish this in only two days“
Mobile, handheld mapping was therefore the ideal solution – chosen for its incredible speed and ease of use. Instead of 1,500 scans, just 14 scans were required (one scan per building) to collect the necessary building elements (floors, walls, ceilings, rooves, doors, and windows) within the required accuracy tolerance.
The Choate Construction team utilized the ZEB Revo to complete the job. With individual scans as quick as just 7 minutes, the average scan time was 40 minutes per building. In total, the team spent less than 10 hours scanning – spending just 2 days on site.
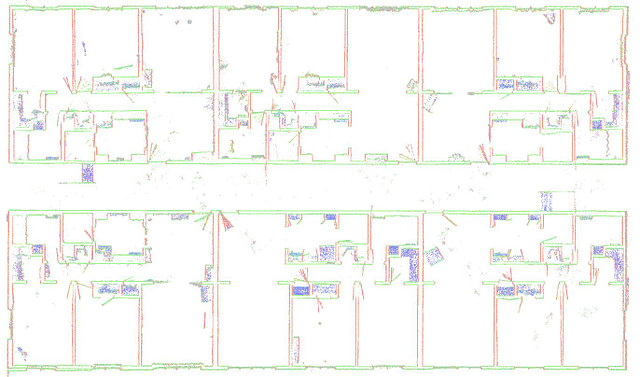
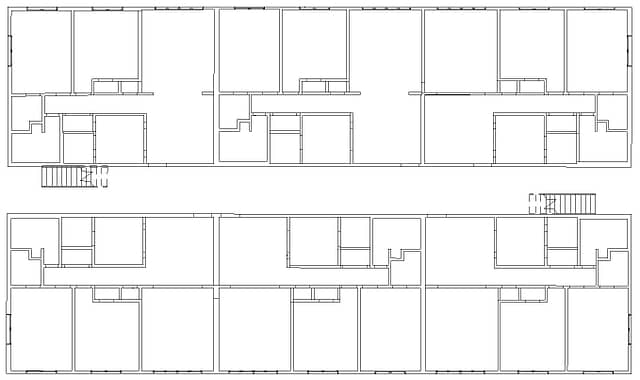
The 3D ZEB Revo data was processed and sectioned in GeoSLAM Hub.
Allowing rapid and simple production of 2D floorplans.
This speed was of particular importance as the residential units were in occupation – with a scan time of just 5 minutes per unit, disruption to residents was kept to an absolute minimum.
The survey team were delighted with the high reliability of the scan data, all within 1” relative and absolute accuracy. They were also surprised by how well the external features (exterior walls and sloped rooves) were captured – with no drift or errors encountered.
The 3D scan data was quickly processed in GeoSLAM Hub – a one-stop shop for point cloud manipulation.
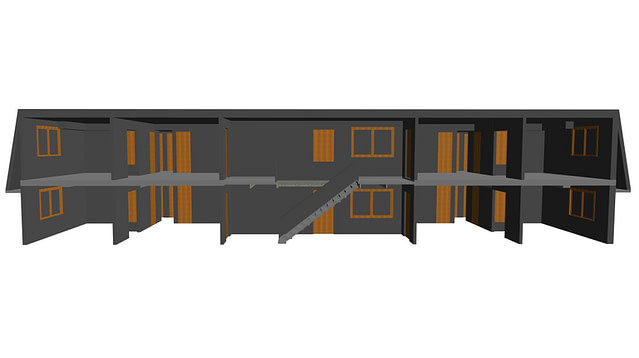
Building elements such as floors, walls, windows and doors were captured in 3D and built in a Revit model.
The office team were able to view the individual 3D point clouds, as well as merging them into one. The data was also sliced into plans, sections and elevations within GeoSLAM Draw, and exported in a CAD-friendly format. From this data, an accurate 3D Revit model was built and supplied to the project architect.
With the increasing incidence of ever-more powerful tropical storms, and an ageing property stock, such quick and simple survey solutions are surely the way of the future
Builders By Design introduce GeoSLAM into their workflow to reduce survey times
Location
London, UK
Scan time
6 – 8 scans per day
Scanned
Residential Properties
Industry
AEC
Builders by Design | Words by Nick Philips
Established in 2001, Builders by Design Ltd are a multi-disciplinary design and construction company based in London. Their expertise and services are mainly in the residential sector for new builds, conversions, and extensions. The core business is a combination of collaborations via competitive tender, negotiated contracts and design and build. They also have a bespoke joinery workshop facility in Park Royal, designing and fabricating furniture, kitchens, windows and doors. One of their greatest achievements to date, was being selected as the main contractor for Peacock House, a new build in Aldeburgh, Suffolk which was awarded a National and Regional RIBA award and was longlisted for Grand Designs House of the Year in 2017.
We spoke with Director, Nick Phillips, following their recent purchase of their GeoSLAM ZEB Revo RT to get an understanding of how this was helping to support their business. Previously, external companies were appointed to produce the 2D surveys which proved to be expensive, time consuming and not without errors and omissions.
Traditional 2D surveys instructed, would only take limited data, meaning important details on areas, such as staircases were incomplete. Inevitably there were times during the later stages of design and construction that the absence of such details required re-working of proposals. The manual process was also not very efficient, as it could take a full day for 1 person to survey a 3-bedroomed house and several weeks to receive the results. Nick identified that projects with existing structures should always start with comprehensive 3D data, which led to the purchase of the GeoSLAM ZEB Revo RT to enable 3D data capture in-house.
“Bringing 3D data capture in house was the obvious next step, with speed and accuracy important factors. For this and other reasons we selected GeoSLAM to provide the equipment and software required. It has had a positive impact on our workflows, which we will look to keep improving“
Before purchasing the ZEB Revo RT, other scanners were considered, such as terrestrial and static, but there were time and software limitations to adopting these more traditional systems. Using these methods was not efficient enough for Builders by Design, as they needed technology with speed, accuracy, and ease of use. Using GeoSLAM handheld solutions meant they could complete between 6-8 scans a day, with the accuracy they needed, whereas a static scanner may only achieve 1-2 scans a day. With current Covid-19 restrictions, having a single operative on site for only 30-minutes to complete the internal and external data capture can bring logistical advantages where a property is still occupied.
Builders by Design have integrated the ZEB Revo RT as an integral part of their digital workflows, providing all the stakeholders with dynamic visualisation material for project design. They use the ZEB Revo RT to scan the 3D point cloud, importing the data into CAD software to create 3D models and 2D planning documentation for the design team. Working in 3D environments together with other visualisation tools has also created a transparency and understanding of design intent between the Architect, the site team and the client that could not have been achieved with 2D plans, sections, and elevations.
Having utilised the GeoSLAM ZEB Revo RT in-house to identify the many benefits to the business, they plan to collaborate with external Architectural and Design practices undertaking their own digital transformation journey, to build templated 2D documentation of existing buildings, 360° site photos, 3D model and bespoke CAD packages. In closing, Nick emphasised that:
“Delivering a point of difference from the competition will become increasingly essential to remain relevant in the market, requiring new 3D technology adoption to assist in achieving fewer errors and more predictable outcomes for all building projects.“
“Billund Airport (BLL) in central Denmark is the second largest airport in the country, processing over 3 million travellers a year. Quite a few of the arriving tourists head to the original LEGOLAND resort which is situated nearby.
Similar to many airports, conveyor belts in the BLL departure terminal carry luggage down to the central baggage room for automated sorting before being loaded onto trolleys for the final few metres out to the waiting aircraft. With a ceiling nearly five metres high, the baggage room is a three-dimensional maze of ascending and descending conveyor belts, support structures, catwalks and HVAC piping.
A 3D model was needed to help determine if new conveyor belts could be threaded through the existing features for the expansion.
“As long as it takes to capture the scan data, that’s how long GeoSLAM Hub takes to process it. That is what is amazing about this technology“
Early in the project planning stage, BLL wasn’t sure how much detail they would need to proceed with the expansion design. We had worked extensively with the GeoSLAM ZEB Revo solution on multiple post-construction quality control jobs and were confident that the handheld device would provide an impressive level of detail in a short amount of time. In fact, it took less than 10 minutes.
After scanning the space, the data was imported into GeoSLAM Hub and the pointcloud was processed in just ten minutes as well.
To further demonstrate the detail of the data collection, LIFA sent a 30m2 section of the point cloud to a subcontractor for feature extraction and modelling. We had quite an amazing set of data, The 3D model included floors, walls, ceiling, conveyor belts, beams, cable trays, lights, railings, pipes, and structural features.
3D model of Billund baggage handling area
Close up 3D model of Billund baggage handling area
BLL officials were so impressed with the level of detail captured by the ZEB Revo, the information formed part of a more detailed model for a tender to upgrade and expand the belts and sorting for arriving baggage.
Bloom Cloud Engine is a powerful on-premise point cloud editor ideal for use in Design, Fabrication, and Construction applications. Easy to deploy across your project team, BloomCE allows users to optimize and condition the point cloud data from all reality capture modalities, providing the fundamentals for Asset Management and Digital Twin project requirements.
Blacklight, based in Romania, focuses on information technology that captures, measures and visualises data used in various fields of activity through providing valuable solutions.
Cybernetech Corporation, based in Japan, is a specialised trading company that offer advanced information and communication equipment and geospatial information technology.
Seiler Instrument is an American company that specialises in distributing surveying software and instruments serving industries such as surveying, engineering and construction.
Favre, Développement & Foresterie, based in Switzerland, are experts in geomatics and work with public and private landowners for forest management and environmental heritage.
3DT Digital Manufacturing is an Australian company that use the latest technology to adapt to changes in real time. It aims to help their customers become more efficient and productive.
Sigma Mascot, based in Hong Kong, provides solutions for 3D Laser Scanning, Geospatial systems and BIM services for industries such as Forestry, Construction and Real Estate.
Precision Laser & Instrument is an American company that offers comprehensive positioning solutions for the Construction, Survey, and GIS industries. They ensure high returns on investments and business success.
Export your point cloud into a range of formats, including LAZ, LAS, PLY and TXT. Datasets can also be exported as structured or unstructured E57 files, both of which include embedded panoramic images.
Surface normals at each point can now be computed from PLY and E57 formats, allowing users to export colourised data and create a high-quality polygonal mesh in third party software .
Stop and Go Georeferencing
Known control points are captured during a scan and automatically compared and matched to the associated coordinates during the processing stage in Connect. A rigid and/or a non-rigid adjustment can be made to the dataset and an accuracy report is exported, highlighting how successful the transformation was. Users can now view and manipulate the processing parameters to ensure a more accurate match between points.
Manual Alignment
Align multiple scans using a combination of manual and automatic processes. This workflow can be performed on two or more scans in the same project. Users have a choice to export the aligned scans separately or as a single merged point cloud.
JP Interactive Viewer
Leverage your GeoSLAM data by integrating JP Interactive Viewer into your workflows. JPIV allows you to unlock the full potential of your reality capture data and distribute actionable insights across your teams.
Our support team will be available for GeoSLAM Care customers on:
Monday 26th, 8 am – 4 pm (GMT)
Tuesday 27th, 8 am – 4 pm (GMT)
Wednesday 28th – 31st December – standard support hours
Monday 2nd January, 8 am – 4 pm (GMT)
From Tuesday 3rd January – standard support hours resume
Test pop-up
fsikajntgfitdshagklndsakj;gnjkdasklngklsa
Click here to view the release notes.
Autodesk Recap
Autodesk Recap contains tools for the manipulation and interpretation of high quality point cloud data and to aid designers and engineers in their creation of 3D models for real-world projects and assets (e.g. buildings and other infrastructure). It’s integrated design features help to streamline workflows, for example Scan to BIM. Recap is used to create initial design projects that users can then take into other Autodesk modules (e.g. Revit, Navisworks, AutoCAD).
Autodesk Navisworks
Autodesk Navisworks is a comprehensive project review solution that supports co-ordination, analysis and communication of design intent and constructability. The software can be used as a common data environment (CDM) for multidisciplinary design data created in a broad range of Building Information Modelling (BIM) packages. Using the tools within Navisworks, users can anticipate and minimise and potential problems between the physical building and the structural model.
Autodesk Revit
Autodesk Revit is a building information modelling (BIM) software. It contains tools which allows for planning and tracking throughout the building’s lifecycle. The software also allows multiple disciplines to collaborate more efficiently and make more informed decisions early in the design process. As GeoSLAM’s hardware allows for quick data capture, the equipment can be used to scan any existing buildings with the purpose of using the data to produce a digital twin.
Orbit GT allows users to capture and manage available 3D data (LiDAR data and imagery), extract a range of features for map production and make data sharable. All Orbit modules are ready to be used with 3D data from indoor, oblique, UAS and mobile mapping projects with other extensions that can be added to the Publisher and Orbit Cloud. Orbit can be used with the ZEB Discovery solution.
ContextCapture
ContextCapture is a reality modelling tool, allowing for the import of any point cloud and imagery data for the creation of high resolution reality meshes. These realistic meshes are accurate representation in 3D with high resolution RGB values of any scanned environment. By using GeoSLAM data in ContextCapture the users are able to create indoor reality meshes, which has been never possible before.
Microstation
Microstation is a 2D/3D software for designing building and infrastructure projects. It includes building information modelling (BIM) tools to document and assess any type of asset throughout its lifecycle. GeoSLAM solutions are often used in Microstation in the underground mining sector and to assess the current stage of any built environment, update the design model, and generate BIM information.
Deswik
With the GeoSLAM Connect stop-and-go georeferencing feature, users can easily georeference headings from known positions and map for analysis of overbreak, underbreak, undercutting and blast roughness calculations. This information is used within Deswik Mapping to analyse headings and levels.
Esri
Outputs from GeoSLAM’s solutions can be input to Esri’s GIS programs and apps, including ArcPro, ArcDesktop, ArcGIS Online and ArcScene. Join point clouds with local geodata or classify and edit scans based on their geography and statistics.
Micromine is a detailed and diverse mining software that provides solutions including modelling, estimation, design, optimisation and scheduling. Once data is exported from Connect it can be imported into Micromine and easily converted into wireframes. These can be used in Micromine for further studies into volumetric slicing, over and underbreak analysis, geologic modelling, face mapping and many more.
Terrasolid provides tools for data processing of airborne and mobile mapping LiDAR data and imagery. It includes different modules for tasks like data manipulation, calibration, georeferencing, point cloud classification, modelling and many more. It is a very powerful tool for a variety of industries, surveyors, civil engineers, planners, designers. Full, UAV or lite versions of Terrasolid modules are available for both MicroStation or Spatix software. All GeoSLAM products are compatible with Terrasolid and GeoSLAM data can be enhanced and edited with this software.
Floorplanner
Floorplanner allows you to draw accurate 2D floorplans within minutes and decorate with over 150,000 items from kitchen appliances to tables and chairs. Data is exported from GeoSLAM Connect in PNG file format with a scale of 1cm per 1 pixel and can be taken into Floorplanner.
Unity
GeoSLAM 3D point cloud data can be imported into Unity 3D Game Engine to generate interactive 3D scenes, where users can create 3D BIM models with textures and explore the space in 3D photorealistic environments.
Unreal Engine
Although Unreal Engine is mainly built for developing games, increasingly users are starting to use it to develop VR applications for understanding the current conditions of buildings, infrastructure and similar. Unreal Engine with a point cloud plugin can be used to visualise GeoSLAM point clouds in VR, which allows for collaboration, simulation and the understanding of current conditions of any scanned environment. Additionally, Unreal Engine tools are completely free.
Veesus Arena4D
Arena4D is a software package for marking up, annotating and editing 3D point cloud data containing a various export capabilities. It has a powerful and simple to use animation package which allows users to visualise massive point clouds in a simple way. GeoSLAM data can be simply uploaded and used in this package for the assessment of the current conditions of any structure, comparing differences between captured data (as built) to designed model (as designed).
Pointfuse
Pointfuse generates 3D meshes from point cloud data and classifies them to building ceilings, walls, windows and other features in IFC format. By using GeoSLAM data with Pointfuse users can very quickly create a classified BIM model with minimal manual input or expertise needed.
MineRP
MineRP has a Spatial DB that uses GeoSLAM data to represent visually the real environment of the underground mine. The software uses other data layers to overlay information on the digital landscape for decision making and tracking.
Pointerra
Pointerra provides a powerful cloud based solution for managing, visualising, working in, analysing, using and sharing massive 3D point clouds and datasets. Pointerra allows users to simply visualise and interrogate GeoSLAM data from anywhere.
Nubigon
Nubigon is a software solution that allows users to seamlessly interact with large point clouds and create visualisations and animations. Take your GeoSLAM point cloud data into Nubigon to create eye-catching flythrough videos.
Here is an example of a visualisation created in Nubigon using GeoSLAM point cloud data:
SLAM Environmental Pre-sets
Common data capture scenarios, such as UAV, outdoor, indoor, linear, and vehicle, have been characterised in Connect and data processing pre-sets for each environment have been defined. These can be selected at the beginning of the data processing stage allowing this process to be highly simplified.
Closed and Open Loop Georeferencing
Both methods match the scan data from a ZEB Locate system with the GPS data collected from the antenna to georeference the point cloud. When a scan starts and ends in the same place, this is classed as “closed loop”. “Open loop” is when the start and end position of a scan are in different locations. Standard SLAM practices apply to both methods of data collection.
Open Loop SLAM for the ZEB Locate is available on request – let’s talk about it.
Stop and Go Alignment
Common static points are captured during several scans meaning that these datasets can be automatically aligned. A single point cloud is then exported as if the data was captured in a single scan.
Floor Slices
Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at a given height above the floor as defined in the processing stage.
Change Detection
Mostly used in the construction industry, multiple point clouds can be compared and any areas that have changed are automatically highlighted. Point clouds can also be compared with CAD models – for instance to track progress on a construction site – and PDF reports can be generated to present this information.
Queued Processing
Import multiple .geoslam files into Connect for processing and the scans will be processed in the order they were imported. The size of the queue can be defined by the user.
Enquire about the ZEB Horizon RT
Error: Contact form not found.
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if pointcloud is coloured)
UK payment plan
UK payment plan info
USA Payment Plan
Coupling with hardware
Some SLAM software algorithms have been made available as open-source on the internet, but they are purely algorithms and not a product that you can take and use off-the-shelf. SLAM is most successful when it is tightly coupled and designed with specific hardware in mind. A generic SLAM cannot perform as well as one that has been specifically designed for a purpose.
Usage in multi-environments
Visual SLAM is closer to the way humans navigate the world, which is why it’s popular with robotic navigation. But in the same vein, vSLAM will have the same image-capture challenges as humans do, for example not being able to look into direct sunlight, or not having enough contrast between the objects picked up in the image. These can be overcome indoors, however, you may need to map a forest, tunnel or urban canyon. While SLAM technologies don’t rely on remote data (meaning you can scan areas where there is no GPS), you do need to ensure the SLAM technology you chose operate well inside, outside, in daylight and darkness.
Real-time data capture
Mapping a property is time-critical. Ideally, you want to make a single visit and gather sufficient data to create a highly accurate 3D model. Ensure the software you choose transforms 3D point cloud data into actionable information in real-time. This allows you to view and interrogate your data whilst still in the field, and make any adjustments, or collect missed data, then and there.
Flexibility and deployment
If you’re trying to map an enclosed environment (e.g. tunnel, mine) or a complex, difficult-to-access space such as a heritage building with tight stairwells and uneven floors, you need to use fully-mobile, adaptable technology. Wheel-based systems, often used with the vSLAM camera, will struggle with access. Handheld devices or LiDAR scanners that can be attached to a drone or pole and still deliver accurate results in a rugged environment are best for navigating hazardous spaces.
Speed and accuracy
While vSLAM is able to provide a qualitative high-level map and sense of the surrounding features, if you’re needing survey-quality accuracy and rich-feature tracking at a local level, you’ll need to consider LiDAR. Cameras require a high-frame-rate and high processing to reconcile data sources and a potential error in visual SLAM is reprojection error, which is the difference between the perceived location of each setpoint
and the actual setpoint.
Quality and distortion
In order to deliver the depth required for high-quality data, a number of depth-sensing cameras are needed with a strong field of view. In most cases, this isn’t possible, especially as cameras with high processing capabilities typically require larger batteries which weigh down airborne scanners, or limit the time of flight. LiDAR is both faster and more accurate than vSLAM, and can deliver detailed point clouds without expensive (and timely) camera processing.