ZEB Horizon used to Capture data on Croatia’s forest to understand biomass
Industry
Conservation
Scan time
9 minutes
Location
Čakovec, Croatia
Size
1km in length
Scanned
Forest
Geocentar | Words by Luka Zalovic
“47% of Croatia’s total land area is covered by forest, an area of approximately 25,000km2 . Management of these vast valuable assets is a key industry in Croatia and across its central European neighbours. As well as managing the biodiversity and sustainability of the forests, it is important for commercial logging companies to assess the quality and biomass of the forests for responsible timber sales. This assessment is a growing need – every year, Croatia adds 10.5 million m3 of forestry to its stock.
Methods of forestry management typically involve measuring the height, diameter and relative position of trees using equipment such as tape measures, ultrasound instruments, total stations and terrestrial laser scanners. However, there are limitations to these methods – they’re often time consuming, involve multiple setups and numerous members of staff to take the measurements (especially since forestry is usually in remote and difficult to access areas). Due to dense canopy cover, forests are usually GNSS-denied areas, and along with the uneven terrain, it can be difficult and time consuming to measure with terrestrial laser scanners.
Geocentar have a large client base in the forestry industry and upon delivery of our new ZEB Horizon mobile laser scanner, we decided to put the technology through its paces and see how it weighs up against other solutions for measuring biomass.
“The ZEB Horizon captures forestry data more accurately than traditional methods and eight times faster“
Visiting the Perivoj Zrinskih park, the ZEB Horizon was initialised on a flat surface before the operator navigated around the park at normal walking pace. With a capture range of 100m, It took just 9 minutes in total to walk around the park and capture all the trees.
Back in the office we processed the data with GeoSLAM Hub software, then exported using GeoSLAM Draw. The data was then imported into an open source forestry programme called 3DForest whereupon several parameters could be measured and extracted automatically including ground extraction, tree detection, tree position detection, tree radius determination, tree height determination, tree crowns detection, crowns volume calculation and crowns collision determination.
Later we revisited the park to check the accuracy of their results and re-produced the survey using a total station with built-in REM (Remote Elevation Measurement) and a measuring tape. Not only did it take four minutes per tree to capture data due to all the total station setups, but only four parameters (diameter, height and relative position) could be calculated using these methods. If they had attempted to measure all 217 trees, it would have taken a whopping 14.5 hours!
Using the ZEB Horizon and 3DForest software, it took 9 minutes to scan the park, 12 to process the data in GeoSLAM Hub, 5 minutes to reduce the data size in Hub and prepare the cloud for the forestry software, which took 90 minutes to process. The total workflow took just under two hours to collect and measure all 217 trees – using traditional methods they could have surveyed just 29 trees in this time.
Geocentar calculated that results were accurate to within 3cm and were more accurate than using traditional methods, leading to great cost savings.
Using LiDAR to understand complex forest environments
Industry
Conservation
Scan time
10 mins per scan
Location
Cornwall, UK
Size
1km in length
Scanned
Eden Project
University of Leicester | Eden Project
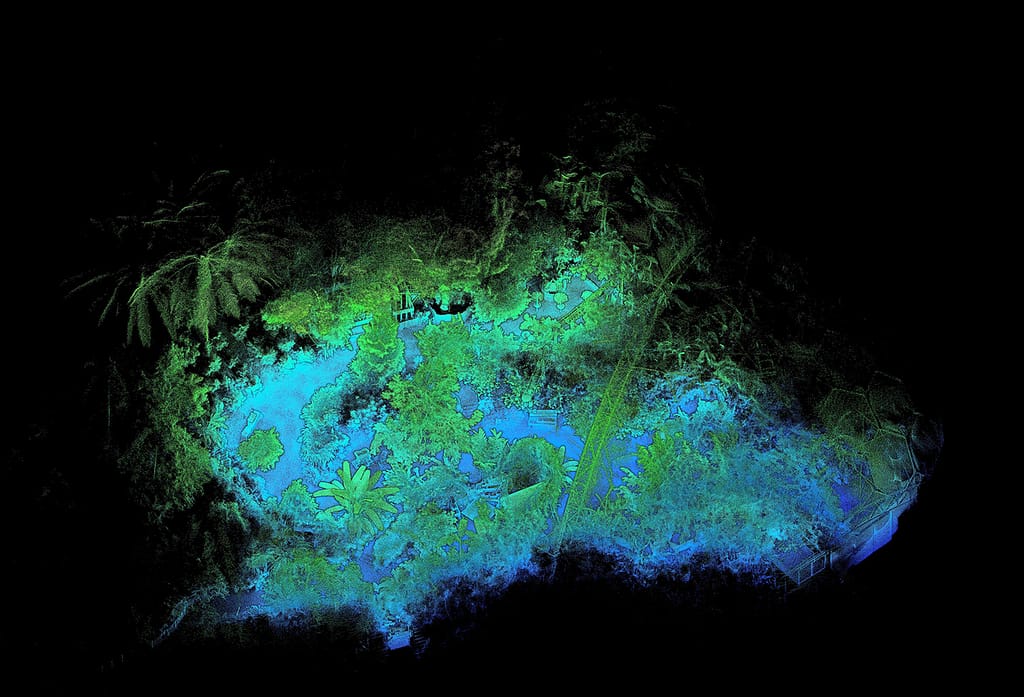
Monitoring and understanding our environment has never been more important as the threat of climate change looms and governments step up to better manage their greenhouse gas emissions. Tom Potter, a doctoral researcher at the University of Leicester, UK, set out to further develop a technique to estimate biomass and carbon more efficiently using state-of-the-art, mobile LiDAR sensors across multiple, complex forest environments.
To do so he visited the Eden Project in Cornwall, UK which reflects a true tropical forest – representing different forests from around the world with a rainforest ‘biome’ of over 1,000 tropical trees and plans. However, he had to work around several challenges. For fixed point scanners, the high-density plots of specimens created a problem of shadows – known as ‘occlusions’ – whereby the nearest features will block out features behind. This also limits the ability to acquire accurate measurements to create a comprehensive 3D model. And with the biome being open to the public and a popular tourist destination, Tom only had a few hours each day before opening hours – insufficient time for a traditional static survey.
“Using GeoSLAM’s local processing software, the raw scan data was processed on site, with no internet connection required – useful when in an actual rainforest!“
Mobile surveying equipment that was able to take readings easily and quickly from even the densest areas was needed to ensure precise scans were taken to accurately calculate biomass and carbon storage potential.
Tom found the mobility and speed of GeoSLAM’s ZEB Revo to be the perfect solution. The lightweight scanner can be pole mounted, handheld or even attached to a vehicle or drone – collecting over 43,000 measurement points per second. Instead of hundreds of time-consuming static scans, Tom captured all angles by simply walking in a loop around the rainforest environment.
He then converted the point cloud data into 3D volume-based plots to derive above-ground biomass and carbon densities for multiple types of tropical forest. A comprehensive dataset was built, containing information for any type of forest that scientists can use to make calculations with minimal survey effort or expertise. And all at considerably less expenditure than traditional survey methods.
Choate Construction utilizes GeoSLAM to create floorplans for hurricane damaged properties
Industry
Construction
Scan time
7 mins per scan
Location
Savannah, Georgia
Size
111,000 sq ft
Scanned
Apartment buildings
Choate Construction | Construction company
2017’s Hurricane Irma was the most powerful storm to hit the continental United States since Katrina in 2005. Besides the high human cost (almost 100 lives lost in the US) the financial cost to property was estimated to top $50 billion – the 5th costliest hurricane in US history.
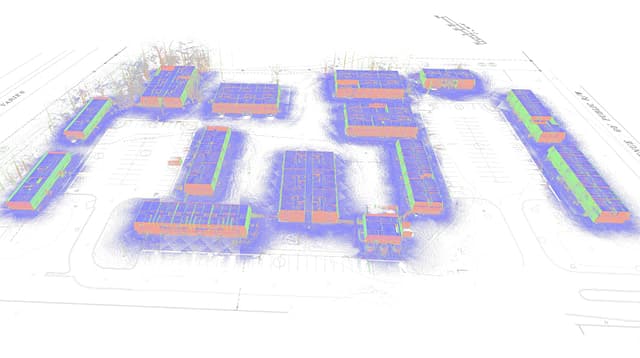
Amongst those damaged properties were the Westlake Apartments in Savannah, Georgia – a complex of 14 buildings containing 100 individual apartments encompassing over 111,000 sq. ft. These residential structures were flooded by the storm surge – meaning major renovations were required to repair the significant water damage.
The Westlake Apartment complex consists of 14 buildings and over 1,000 rooms
With the complex dating from 1974, no building blueprints were in existence. The huge task facing contractor Choate Construction was therefore to rapidly collect this spatial data to produce the necessary internal floorplans and external elevations. Utilizing a static scanner was out of the question as to capture all necessary data would have required over 1,500 individual set-ups – at an estimated timescale of 3 weeks.
“This would have taken over 75 hours of scanner time along with a static scanner, with the ZEB Revo we were able to accomplish this in only two days“
Mobile, handheld mapping was therefore the ideal solution – chosen for its incredible speed and ease of use. Instead of 1,500 scans, just 14 scans were required (one scan per building) to collect the necessary building elements (floors, walls, ceilings, rooves, doors, and windows) within the required accuracy tolerance.
The Choate Construction team utilized the ZEB Revo to complete the job. With individual scans as quick as just 7 minutes, the average scan time was 40 minutes per building. In total, the team spent less than 10 hours scanning – spending just 2 days on site.
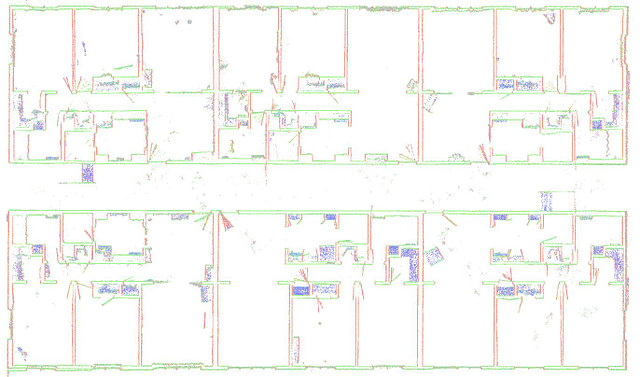
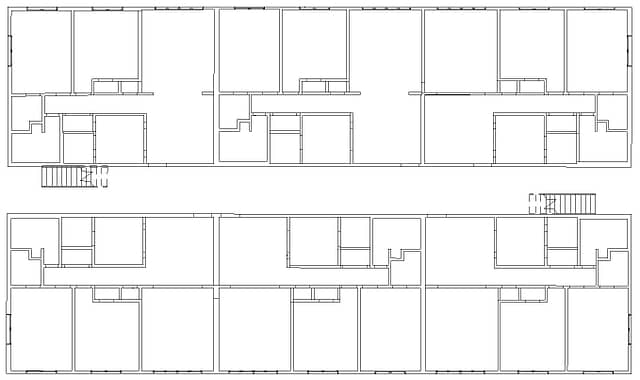
The 3D ZEB Revo data was processed and sectioned in GeoSLAM Hub.
Allowing rapid and simple production of 2D floorplans.
This speed was of particular importance as the residential units were in occupation – with a scan time of just 5 minutes per unit, disruption to residents was kept to an absolute minimum.
The survey team were delighted with the high reliability of the scan data, all within 1” relative and absolute accuracy. They were also surprised by how well the external features (exterior walls and sloped rooves) were captured – with no drift or errors encountered.
The 3D scan data was quickly processed in GeoSLAM Hub – a one-stop shop for point cloud manipulation.
Building elements such as floors, walls, windows and doors were captured in 3D and built in a Revit model.
The office team were able to view the individual 3D point clouds, as well as merging them into one. The data was also sliced into plans, sections and elevations within GeoSLAM Draw, and exported in a CAD-friendly format. From this data, an accurate 3D Revit model was built and supplied to the project architect.
With the increasing incidence of ever-more powerful tropical storms, and an ageing property stock, such quick and simple survey solutions are surely the way of the future
Historic England map out damaged Ramsgate tunnels for redevelopment
Location
Ramsgate, UK
Scan time
10 mins per scan
Size
1km in length
Scanned
Underground tunnel
Industry
Conservation
ZEB Horizon IMapping underground WWI tunnels
There is no doubt that historical projects hold great significance for a location’s cultural heritage and its people. This is the fundamental concept that Historic England apply in their protection and conservation of sites that define English history and the nation itself. They work within communities and alongside specialists to share their knowledge and skills so that everyone can enjoy and maintain the history that surrounds us.
This is evident in Historic England’s Ramsgate Tunnels project, a five-kilometre network of underground passageways which were paramount to the war effort and the safety of local people of Ramsgate, Kent.
Ramsgate Tunnels were once used as an underground narrow-gauge railway, built to connect the town and docks to help improve trade links to Europe. However, the railway soon became a target for enemy bombing. To combat this, it was decided that the network of tunnels should be adapted to protect the people of Ramsgate, and work on this began in 1939.
“GeoSLAM technology was at the top of our list to scan the underground network, primarily due to its long range capabilities”
After falling into disrepair, leaving behind a long-existing collapse in one area of the tunnels, our team at Historic England was invited to work alongside Ramsgate’s Heritage Action Zone in order to redevelop the area’s much-loved historical sites. Enlisting the help of GeoSLAM’s ZEB Horizon to provide a preliminary map of the damage, plans were put in place to assess tunnels that were previously inaccessible in order to extend visitor access.
Ramsgate tunnel
The ZEB Horizon allowed our team to reach further down each channel where we needed a quick overview of the extent of the damage, and its approximate location relative to the surface. A total of nine scans comprised the complete survey, taking around 10 minutes for each scan. Compared to a static scanner, GeoSLAM’s ZEB Horizon improved the speed of the scanning process dramatically
Placed first in Australia and 20th in the world, Australian National University (ANU) is a research institution with its main campus in Canberra, the country’s capital. The university’s research priorities typically reflect the challenges facing the world today. One such project is to track tree growth and development over time in a joint effort between ANU and Australia’s Commonwealth Scientific and Industrial Research Organisation (CSIRO).
Known as the ‘Precision Measurement of Trees and Forests’ project, the field team is charged with comparing and contrasting different ways of collecting data, using different terrestrial and airborne laser scanners, and working with digital imagery. The survey takes places in the National Arboretum in Canberra which features some 44,000 rare, endangered and symbolic trees and is made up of 94 mini forests.
Image footer: The National Arboretum covers 250 hectares of land within striking distance of Canberra CBD (Image courtesy of Tonkin Zulaikha Greer Architects).
GeoSLAM’s “go-anywhere” mapping technology was a natural choice for the outdoor project. Unlike terrestrial systems, the splash-proof, dust-tight, mobile laser scanners are designed to operate in the most difficult-to-access spaces, inside or outside, in daylight and darkness – without the need for GPS. What’s more, you can easily attach the portable laser scanners to a drone or helicopter for fast outdoor surveying.
In addition to GeoSLAM’s versatile handheld technology, the team also uses fixed point scanning and traditional forestry measures – such as Suunto and digital photographs from UAV’s. Tom Jovanovic, former CSIRO researcher and now Interactive Technology Specialist at the University of Newcastle, Australia, explains that the technologies are complementary, “Using GeoSLAM from the outset, as well as a different system, has enabled us to compare and contrast different measurements and combine them into a heavily monitored site finding. This includes the high level of resolution being sought.”
“What I really like about this product is that wherever you can walk, you can scan. It really is a case of ‘go-anywhere’ “
Emphasising that the project is specifically designed to take advantage of both static and mobile approaches, Tom Jovanovic says, “What’s nice about scanning with GeoSLAM’s technology is that it doesn’t involve repeatedly setting up in different locations within the research plot. You just initiate the start-up procedure then walk around the plot covering the trees from different angles.”
All forestry professionals like Tom need access to user-friendly technology that is easy to operate but is robust and reliable enough to do the job quickly and accurately. With GeoSLAM scanning technology, he says it takes only 10 to 15 minutes to completely cover a 180 square meter plot, adding, “What I really like about this product is that wherever you can walk, you can scan. It really is a case of ‘go-anywhere’. The scanner has made a significant contribution to an important undertaking. Mobile scanning that gives us dynamic changes over time – from any angle and in 3D – is a very important contributor to this work.”
“Mobile scanning that gives us dynamic changes over time – from any angle and in 3D – is a very important contributor to this work“
These GeoSLAM-delivered findings are vital to the project’s long-term aim. Combining them with knowledge of water usage and photo synthesis, plus meteorological data and high resolution photography, they feed into very fine scale modelling that will guide forestry research management and habitat protection policies into the future.
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
View and download data in our free point cloud viewer
Here’s some helpful tips for the best viewing experience
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if point cloud is coloured).
Bloom Cloud Engine is a powerful on-premise point cloud editor ideal for use in Design, Fabrication, and Construction applications. Easy to deploy across your project team, BloomCE allows users to optimize and condition the point cloud data from all reality capture modalities, providing the fundamentals for Asset Management and Digital Twin project requirements.
Blacklight, based in Romania, focuses on information technology that captures, measures and visualises data used in various fields of activity through providing valuable solutions.
Cybernetech Corporation, based in Japan, is a specialised trading company that offer advanced information and communication equipment and geospatial information technology.
Seiler Instrument is an American company that specialises in distributing surveying software and instruments serving industries such as surveying, engineering and construction.
Favre, Développement & Foresterie, based in Switzerland, are experts in geomatics and work with public and private landowners for forest management and environmental heritage.
3DT Digital Manufacturing is an Australian company that use the latest technology to adapt to changes in real time. It aims to help their customers become more efficient and productive.
Sigma Mascot, based in Hong Kong, provides solutions for 3D Laser Scanning, Geospatial systems and BIM services for industries such as Forestry, Construction and Real Estate.
Precision Laser & Instrument is an American company that offers comprehensive positioning solutions for the Construction, Survey, and GIS industries. They ensure high returns on investments and business success.
Export your point cloud into a range of formats, including LAZ, LAS, PLY and TXT. Datasets can also be exported as structured or unstructured E57 files, both of which include embedded panoramic images.
Surface normals at each point can now be computed from PLY and E57 formats, allowing users to export colourised data and create a high-quality polygonal mesh in third party software .
Stop and Go Georeferencing
Known control points are captured during a scan and automatically compared and matched to the associated coordinates during the processing stage in Connect. A rigid and/or a non-rigid adjustment can be made to the dataset and an accuracy report is exported, highlighting how successful the transformation was. Users can now view and manipulate the processing parameters to ensure a more accurate match between points.
Manual Alignment
Align multiple scans using a combination of manual and automatic processes. This workflow can be performed on two or more scans in the same project. Users have a choice to export the aligned scans separately or as a single merged point cloud.
JP Interactive Viewer
Leverage your GeoSLAM data by integrating JP Interactive Viewer into your workflows. JPIV allows you to unlock the full potential of your reality capture data and distribute actionable insights across your teams.
Our support team will be available for GeoSLAM Care customers on:
Monday 26th, 8 am – 4 pm (GMT)
Tuesday 27th, 8 am – 4 pm (GMT)
Wednesday 28th – 31st December – standard support hours
Monday 2nd January, 8 am – 4 pm (GMT)
From Tuesday 3rd January – standard support hours resume
Test pop-up
fsikajntgfitdshagklndsakj;gnjkdasklngklsa
Click here to view the release notes.
Autodesk Recap
Autodesk Recap contains tools for the manipulation and interpretation of high quality point cloud data and to aid designers and engineers in their creation of 3D models for real-world projects and assets (e.g. buildings and other infrastructure). It’s integrated design features help to streamline workflows, for example Scan to BIM. Recap is used to create initial design projects that users can then take into other Autodesk modules (e.g. Revit, Navisworks, AutoCAD).
Autodesk Navisworks
Autodesk Navisworks is a comprehensive project review solution that supports co-ordination, analysis and communication of design intent and constructability. The software can be used as a common data environment (CDM) for multidisciplinary design data created in a broad range of Building Information Modelling (BIM) packages. Using the tools within Navisworks, users can anticipate and minimise and potential problems between the physical building and the structural model.
Autodesk Revit
Autodesk Revit is a building information modelling (BIM) software. It contains tools which allows for planning and tracking throughout the building’s lifecycle. The software also allows multiple disciplines to collaborate more efficiently and make more informed decisions early in the design process. As GeoSLAM’s hardware allows for quick data capture, the equipment can be used to scan any existing buildings with the purpose of using the data to produce a digital twin.
Orbit GT allows users to capture and manage available 3D data (LiDAR data and imagery), extract a range of features for map production and make data sharable. All Orbit modules are ready to be used with 3D data from indoor, oblique, UAS and mobile mapping projects with other extensions that can be added to the Publisher and Orbit Cloud. Orbit can be used with the ZEB Discovery solution.
ContextCapture
ContextCapture is a reality modelling tool, allowing for the import of any point cloud and imagery data for the creation of high resolution reality meshes. These realistic meshes are accurate representation in 3D with high resolution RGB values of any scanned environment. By using GeoSLAM data in ContextCapture the users are able to create indoor reality meshes, which has been never possible before.
Microstation
Microstation is a 2D/3D software for designing building and infrastructure projects. It includes building information modelling (BIM) tools to document and assess any type of asset throughout its lifecycle. GeoSLAM solutions are often used in Microstation in the underground mining sector and to assess the current stage of any built environment, update the design model, and generate BIM information.
Deswik
With the GeoSLAM Connect stop-and-go georeferencing feature, users can easily georeference headings from known positions and map for analysis of overbreak, underbreak, undercutting and blast roughness calculations. This information is used within Deswik Mapping to analyse headings and levels.
Esri
Outputs from GeoSLAM’s solutions can be input to Esri’s GIS programs and apps, including ArcPro, ArcDesktop, ArcGIS Online and ArcScene. Join point clouds with local geodata or classify and edit scans based on their geography and statistics.
Micromine is a detailed and diverse mining software that provides solutions including modelling, estimation, design, optimisation and scheduling. Once data is exported from Connect it can be imported into Micromine and easily converted into wireframes. These can be used in Micromine for further studies into volumetric slicing, over and underbreak analysis, geologic modelling, face mapping and many more.
Terrasolid provides tools for data processing of airborne and mobile mapping LiDAR data and imagery. It includes different modules for tasks like data manipulation, calibration, georeferencing, point cloud classification, modelling and many more. It is a very powerful tool for a variety of industries, surveyors, civil engineers, planners, designers. Full, UAV or lite versions of Terrasolid modules are available for both MicroStation or Spatix software. All GeoSLAM products are compatible with Terrasolid and GeoSLAM data can be enhanced and edited with this software.
Floorplanner
Floorplanner allows you to draw accurate 2D floorplans within minutes and decorate with over 150,000 items from kitchen appliances to tables and chairs. Data is exported from GeoSLAM Connect in PNG file format with a scale of 1cm per 1 pixel and can be taken into Floorplanner.
Unity
GeoSLAM 3D point cloud data can be imported into Unity 3D Game Engine to generate interactive 3D scenes, where users can create 3D BIM models with textures and explore the space in 3D photorealistic environments.
Unreal Engine
Although Unreal Engine is mainly built for developing games, increasingly users are starting to use it to develop VR applications for understanding the current conditions of buildings, infrastructure and similar. Unreal Engine with a point cloud plugin can be used to visualise GeoSLAM point clouds in VR, which allows for collaboration, simulation and the understanding of current conditions of any scanned environment. Additionally, Unreal Engine tools are completely free.
Veesus Arena4D
Arena4D is a software package for marking up, annotating and editing 3D point cloud data containing a various export capabilities. It has a powerful and simple to use animation package which allows users to visualise massive point clouds in a simple way. GeoSLAM data can be simply uploaded and used in this package for the assessment of the current conditions of any structure, comparing differences between captured data (as built) to designed model (as designed).
Pointfuse
Pointfuse generates 3D meshes from point cloud data and classifies them to building ceilings, walls, windows and other features in IFC format. By using GeoSLAM data with Pointfuse users can very quickly create a classified BIM model with minimal manual input or expertise needed.
MineRP
MineRP has a Spatial DB that uses GeoSLAM data to represent visually the real environment of the underground mine. The software uses other data layers to overlay information on the digital landscape for decision making and tracking.
Pointerra
Pointerra provides a powerful cloud based solution for managing, visualising, working in, analysing, using and sharing massive 3D point clouds and datasets. Pointerra allows users to simply visualise and interrogate GeoSLAM data from anywhere.
Nubigon
Nubigon is a software solution that allows users to seamlessly interact with large point clouds and create visualisations and animations. Take your GeoSLAM point cloud data into Nubigon to create eye-catching flythrough videos.
Here is an example of a visualisation created in Nubigon using GeoSLAM point cloud data:
SLAM Environmental Pre-sets
Common data capture scenarios, such as UAV, outdoor, indoor, linear, and vehicle, have been characterised in Connect and data processing pre-sets for each environment have been defined. These can be selected at the beginning of the data processing stage allowing this process to be highly simplified.
Closed and Open Loop Georeferencing
Both methods match the scan data from a ZEB Locate system with the GPS data collected from the antenna to georeference the point cloud. When a scan starts and ends in the same place, this is classed as “closed loop”. “Open loop” is when the start and end position of a scan are in different locations. Standard SLAM practices apply to both methods of data collection.
Open Loop SLAM for the ZEB Locate is available on request – let’s talk about it.
Stop and Go Alignment
Common static points are captured during several scans meaning that these datasets can be automatically aligned. A single point cloud is then exported as if the data was captured in a single scan.
Floor Slices
Horizontal and vertical slices can be taken from any location within the point cloud. Horizontal floor slices can also be automatically taken at a given height above the floor as defined in the processing stage.
Change Detection
Mostly used in the construction industry, multiple point clouds can be compared and any areas that have changed are automatically highlighted. Point clouds can also be compared with CAD models – for instance to track progress on a construction site – and PDF reports can be generated to present this information.
Queued Processing
Import multiple .geoslam files into Connect for processing and the scans will be processed in the order they were imported. The size of the queue can be defined by the user.
Enquire about the ZEB Horizon RT
Error: Contact form not found.
If your internet connection allows, move the Point Budget slider to the maximum amount available to view all the points in the cloud.
Making the point size smaller using the Point Size slider makes the data easier to view and interpret.
In the tools section of the viewer, you can measure the distance and angles of features within the pointcloud.
Using the materials section of the viewer, you can use the Select Attributes dropdown to view by intensity, elevation and RGB (if pointcloud is coloured)
UK payment plan
UK payment plan info
USA Payment Plan
Coupling with hardware
Some SLAM software algorithms have been made available as open-source on the internet, but they are purely algorithms and not a product that you can take and use off-the-shelf. SLAM is most successful when it is tightly coupled and designed with specific hardware in mind. A generic SLAM cannot perform as well as one that has been specifically designed for a purpose.
Usage in multi-environments
Visual SLAM is closer to the way humans navigate the world, which is why it’s popular with robotic navigation. But in the same vein, vSLAM will have the same image-capture challenges as humans do, for example not being able to look into direct sunlight, or not having enough contrast between the objects picked up in the image. These can be overcome indoors, however, you may need to map a forest, tunnel or urban canyon. While SLAM technologies don’t rely on remote data (meaning you can scan areas where there is no GPS), you do need to ensure the SLAM technology you chose operate well inside, outside, in daylight and darkness.
Real-time data capture
Mapping a property is time-critical. Ideally, you want to make a single visit and gather sufficient data to create a highly accurate 3D model. Ensure the software you choose transforms 3D point cloud data into actionable information in real-time. This allows you to view and interrogate your data whilst still in the field, and make any adjustments, or collect missed data, then and there.
Flexibility and deployment
If you’re trying to map an enclosed environment (e.g. tunnel, mine) or a complex, difficult-to-access space such as a heritage building with tight stairwells and uneven floors, you need to use fully-mobile, adaptable technology. Wheel-based systems, often used with the vSLAM camera, will struggle with access. Handheld devices or LiDAR scanners that can be attached to a drone or pole and still deliver accurate results in a rugged environment are best for navigating hazardous spaces.
Speed and accuracy
While vSLAM is able to provide a qualitative high-level map and sense of the surrounding features, if you’re needing survey-quality accuracy and rich-feature tracking at a local level, you’ll need to consider LiDAR. Cameras require a high-frame-rate and high processing to reconcile data sources and a potential error in visual SLAM is reprojection error, which is the difference between the perceived location of each setpoint
and the actual setpoint.
Quality and distortion
In order to deliver the depth required for high-quality data, a number of depth-sensing cameras are needed with a strong field of view. In most cases, this isn’t possible, especially as cameras with high processing capabilities typically require larger batteries which weigh down airborne scanners, or limit the time of flight. LiDAR is both faster and more accurate than vSLAM, and can deliver detailed point clouds without expensive (and timely) camera processing.